 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimCoachCorpus: A naturalistic dataset with language and trajectories for embodied teaching
Sep 18, 2025Curated datasets are essential for training and evaluating AI approaches, but are often lacking in domains where language and physical action are deeply intertwined. In particular, few datasets capture how people acquire embodied skills through verbal instruction over time. To address this gap, we introduce SimCoachCorpus: a unique dataset of race car simulator driving that allows for the investigation of rich interactive phenomena during guided and unguided motor skill acquisition. In this dataset, 29 humans were asked to drive in a simulator around a race track for approximately ninety minutes. Fifteen participants were given personalized one-on-one instruction from a professional performance driving coach, and 14 participants drove without coaching. \name\ includes embodied features such as vehicle state and inputs, map (track boundaries and raceline), and cone landmarks. These are synchronized with concurrent verbal coaching from a professional coach and additional feedback at the end of each lap. We further provide annotations of coaching categories for each concurrent feedback utterance, ratings on students' compliance with coaching advice, and self-reported cognitive load and emotional state of participants (gathered from surveys during the study). The dataset includes over 20,000 concurrent feedback utterances, over 400 terminal feedback utterances, and over 40 hours of vehicle driving data. Our naturalistic dataset can be used for investigating motor learning dynamics, exploring linguistic phenomena, and training computational models of teaching. We demonstrate applications of this dataset for in-context learning, imitation learning, and topic modeling. The dataset introduced in this work will be released publicly upon publication of the peer-reviewed version of this paper. Researchers interested in early access may register at https://tinyurl.com/SimCoachCorpusForm.
Active Intent Disambiguation for Shared Control Robots
May 07, 2020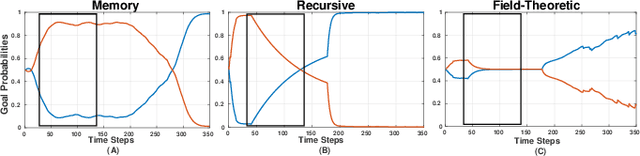
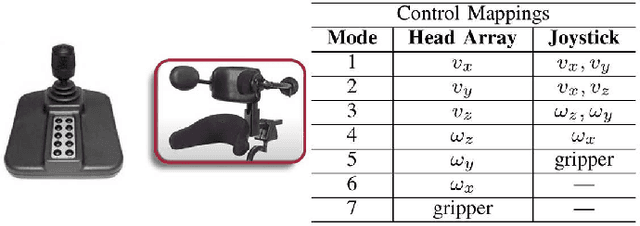
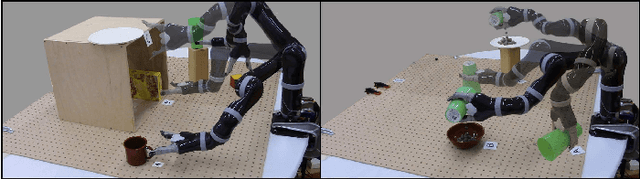
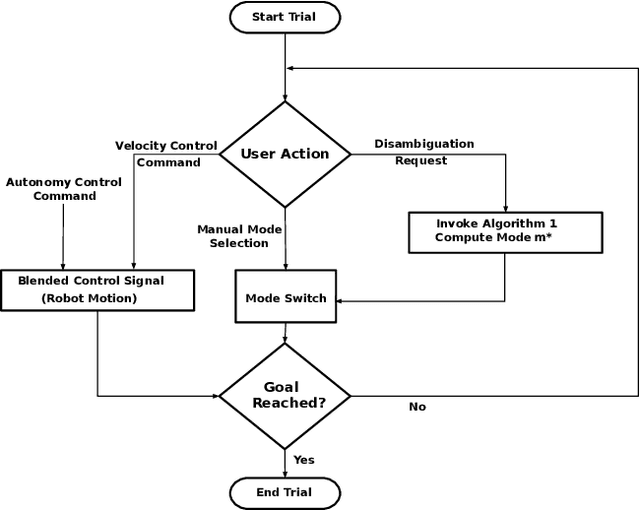
Assistive shared-control robots have the potential to transform the lives of millions of people afflicted with severe motor impairments. The usefulness of shared-control robots typically relies on the underlying autonomy's ability to infer the user's needs and intentions, and the ability to do so unambiguously is often a limiting factor for providing appropriate assistance confidently and accurately. The contributions of this paper are four-fold. First, we introduce the idea of intent disambiguation via control mode selection, and present a mathematical formalism for the same. Second, we develop a control mode selection algorithm which selects the control mode in which the user-initiated motion helps the autonomy to maximally disambiguate user intent. Third, we present a pilot study with eight subjects to evaluate the efficacy of the disambiguation algorithm. Our results suggest that the disambiguation system (a) helps to significantly reduce task effort, as measured by number of button presses, and (b) is of greater utility for more limited control interfaces and more complex tasks. We also observe that (c) subjects demonstrated a wide range of disambiguation request behaviors, with the common thread of concentrating requests early in the execution. As our last contribution, we introduce a novel field-theoretic approach to intent inference inspired by dynamic field theory that works in tandem with the disambiguation scheme.