 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Regression 2D-3D Ultrasound Registration for Liver Motion Correction in Focal Tumor Thermal Ablation
Oct 03, 2024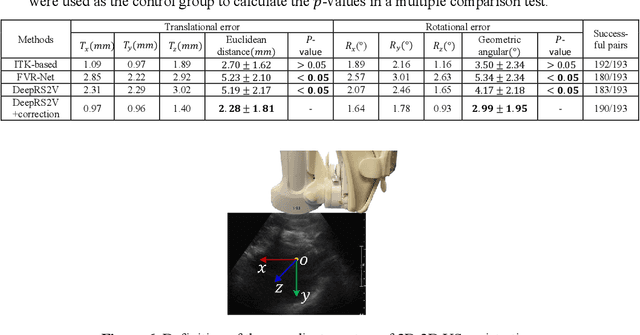
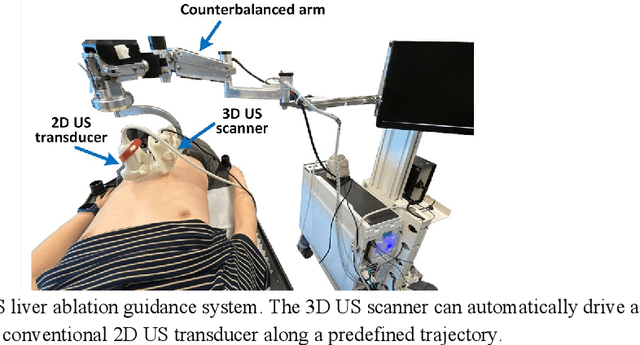
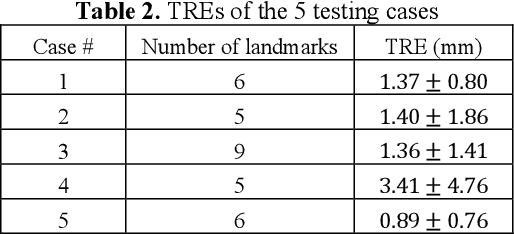
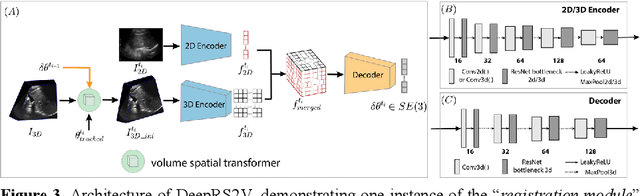
Liver tumor ablation procedures require accurate placement of the needle applicator at the tumor centroid. The lower-cost and real-time nature of ultrasound (US) has advantages over computed tomography (CT) for applicator guidance, however, in some patients, liver tumors may be occult on US and tumor mimics can make lesion identification challenging. Image registration techniques can aid in interpreting anatomical details and identifying tumors, but their clinical application has been hindered by the tradeoff between alignment accuracy and runtime performance, particularly when compensating for liver motion due to patient breathing or movement. Therefore, we propose a 2D-3D US registration approach to enable intra-procedural alignment that mitigates errors caused by liver motion. Specifically, our approach can correlate imbalanced 2D and 3D US image features and use continuous 6D rotation representations to enhance the model's training stability. The dataset was divided into 2388, 196 and 193 image pairs for training, validation and testing, respectively. Our approach achieved a mean Euclidean distance error of 2.28 mm $\pm$ 1.81 mm and a mean geodesic angular error of 2.99$^{\circ}$ $\pm$ 1.95$^{\circ}$, with a runtime of 0.22 seconds per 2D-3D US image pair. These results demonstrate that our approach can achieve accurate alignment and clinically acceptable runtime, indicating potential for clinical translation.