 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatially Constrained Location Prior for Scene Parsing
Feb 24, 2018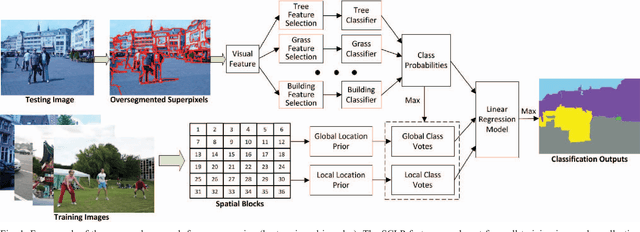
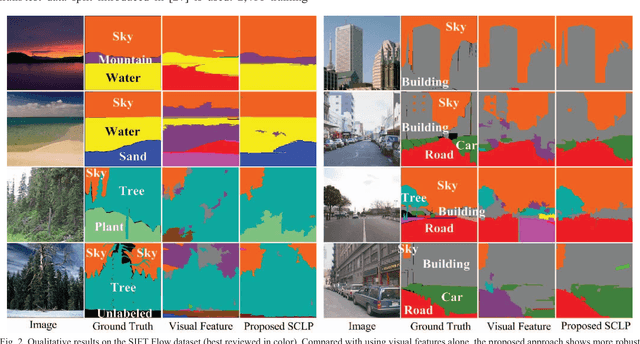
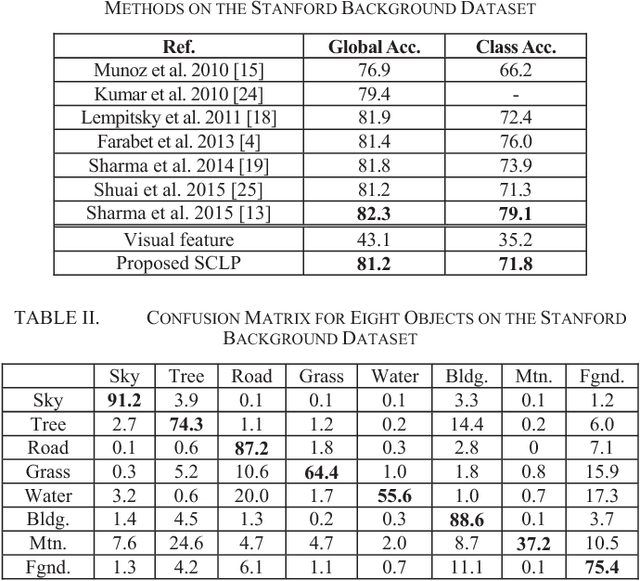
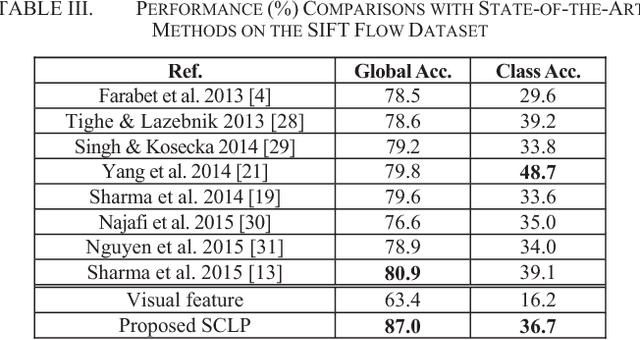
Semantic context is an important and useful cue for scene parsing in complicated natural images with a substantial amount of variations in objects and the environment. This paper proposes Spatially Constrained Location Prior (SCLP) for effective modelling of global and local semantic context in the scene in terms of inter-class spatial relationships. Unlike existing studies focusing on either relative or absolute location prior of objects, the SCLP effectively incorporates both relative and absolute location priors by calculating object co-occurrence frequencies in spatially constrained image blocks. The SCLP is general and can be used in conjunction with various visual feature-based prediction models, such as Artificial Neural Networks and Support Vector Machine (SVM), to enforce spatial contextual constraints on class labels. Using SVM classifiers and a linear regression model, we demonstrate that the incorporation of SCLP achieves superior performance compared to the state-of-the-art methods on the Stanford background and SIFT Flow datasets.
* authors' pre-print version of a article published in IJCNN 2016
Density Weighted Connectivity of Grass Pixels in Image Frames for Biomass Estimation
Feb 21, 2018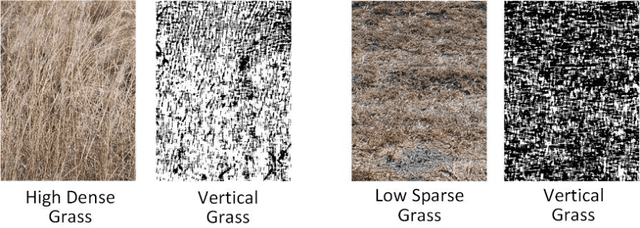
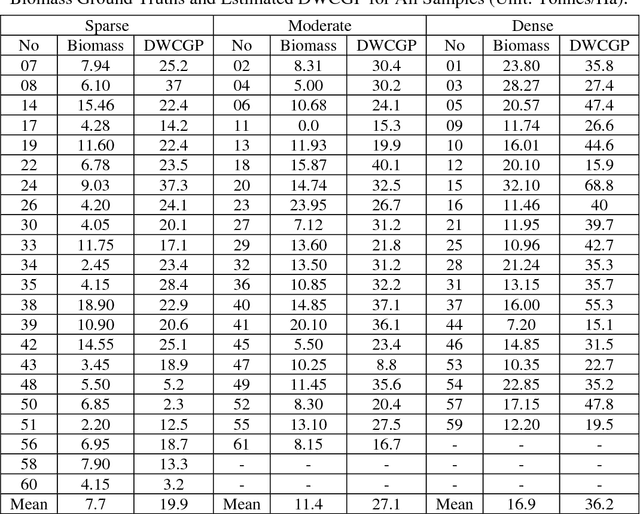
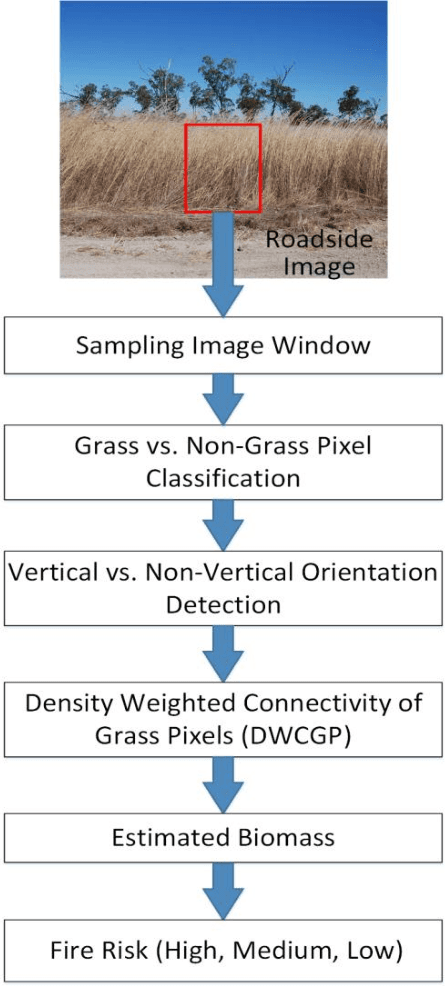

Accurate estimation of the biomass of roadside grasses plays a significant role in applications such as fire-prone region identification. Current solutions heavily depend on field surveys, remote sensing measurements and image processing using reference markers, which often demand big investments of time, effort and cost. This paper proposes Density Weighted Connectivity of Grass Pixels (DWCGP) to automatically estimate grass biomass from roadside image data. The DWCGP calculates the length of continuously connected grass pixels along a vertical orientation in each image column, and then weights the length by the grass density in a surrounding region of the column. Grass pixels are classified using feedforward artificial neural networks and the dominant texture orientation at every pixel is computed using multi-orientation Gabor wavelet filter vote. Evaluations on a field survey dataset show that the DWCGP reduces Root-Mean-Square Error from 5.84 to 5.52 by additionally considering grass density on top of grass height. The DWCGP shows robustness to non-vertical grass stems and to changes of both Gabor filter parameters and surrounding region widths. It also has performance close to human observation and higher than eight baseline approaches, as well as promising results for classifying low vs. high fire risk and identifying fire-prone road regions.