 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMutex Graphs and Multicliques: Reducing Grounding Size for Planning
Sep 18, 2019
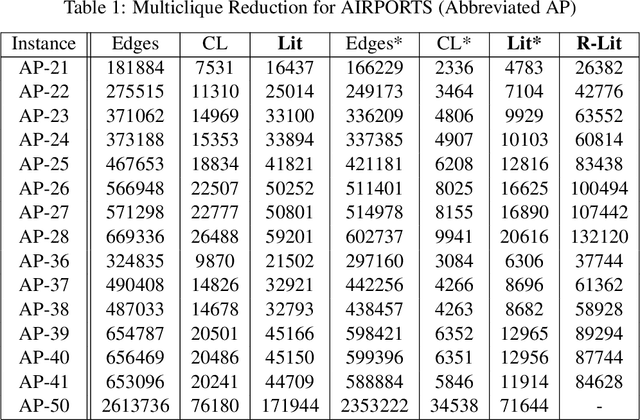

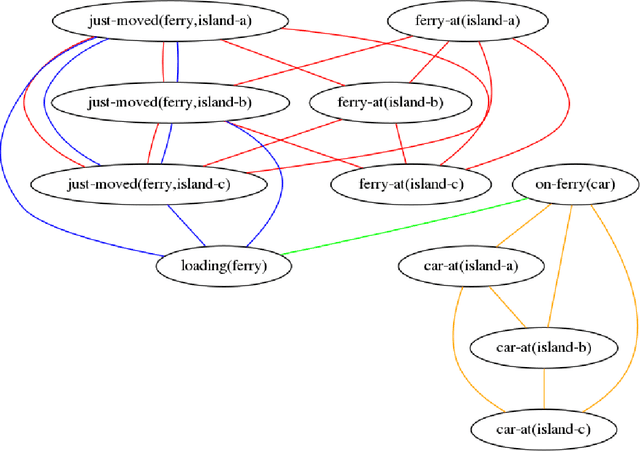
We present an approach to representing large sets of mutual exclusions, also known as mutexes or mutex constraints. These are the types of constraints that specify the exclusion of some properties, events, processes, and so on. They are ubiquitous in many areas of applications. The size of these constraints for a given problem can be overwhelming enough to present a bottleneck for the solving efficiency of the underlying solver. In this paper, we propose a novel graph-theoretic technique based on multicliques for a compact representation of mutex constraints and apply it to domain-independent planning in ASP. As computing a minimum multiclique covering from a mutex graph is NP-hard, we propose an efficient approximation algorithm for multiclique covering and show experimentally that it generates substantially smaller grounding size for mutex constraints in ASP than the previously known work in SAT.
* In Proceedings ICLP 2019, arXiv:1909.07646
Domain-Independent Cost-Optimal Planning in ASP
Jul 31, 2019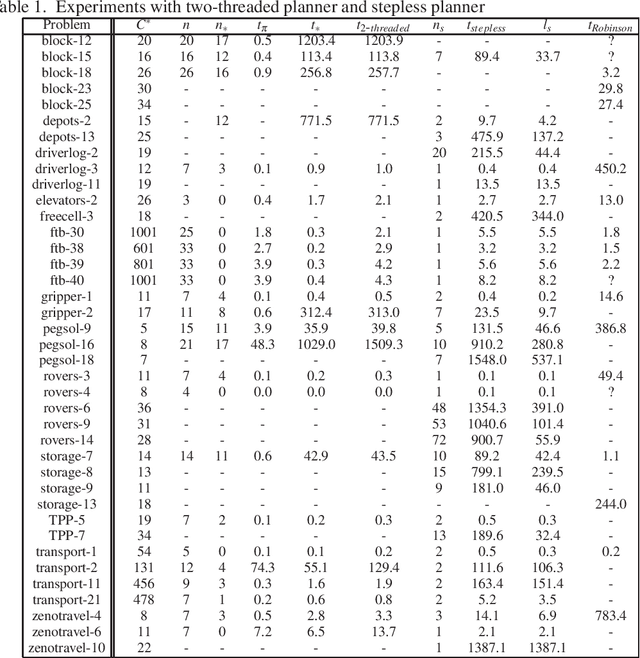
We investigate the problem of cost-optimal planning in ASP. Current ASP planners can be trivially extended to a cost-optimal one by adding weak constraints, but only for a given makespan (number of steps). It is desirable to have a planner that guarantees global optimality. In this paper, we present two approaches to addressing this problem. First, we show how to engineer a cost-optimal planner composed of two ASP programs running in parallel. Using lessons learned from this, we then develop an entirely new approach to cost-optimal planning, stepless planning, which is completely free of makespan. Experiments to compare the two approaches with the only known cost-optimal planner in SAT reveal good potentials for stepless planning in ASP. The paper is under consideration for acceptance in TPLP.