 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect Interval Propagation Methods using Neural-Network Surrogates for Uncertainty Quantification in Physical Systems Surrogate Model
Mar 22, 2026In engineering, uncertainty propagation aims to characterise system outputs under uncertain inputs. For interval uncertainty, the goal is to determine output bounds given interval-valued inputs, which is critical for robust design optimisation and reliability analysis. However, standard interval propagation relies on solving optimisation problems that become computationally expensive for complex systems. Surrogate models alleviate this cost but typically replace only the evaluator within the optimisation loop, still requiring many inference calls. To overcome this limitation, we reformulate interval propagation as an interval-valued regression problem that directly predicts output bounds. We present a comprehensive study of neural network-based surrogate models, including multilayer perceptrons (MLPs) and deep operator networks (DeepONet), for this task. Three approaches are investigated: (i) naive interval propagation through standard architectures, (ii) bound propagation methods such as Interval Bound Propagation (IBP) and CROWN, and (iii) interval neural networks (INNs) with interval weights. Results show that these methods significantly improve computational efficiency over traditional optimisation-based approaches while maintaining accurate interval estimates. We further discuss practical limitations and open challenges in applying interval-based propagation methods.
Set-based v.s. Distribution-based Representations of Epistemic Uncertainty: A Comparative Study
Feb 26, 2026Epistemic uncertainty in neural networks is commonly modeled using two second-order paradigms: distribution-based representations, which rely on posterior parameter distributions, and set-based representations based on credal sets (convex sets of probability distributions). These frameworks are often regarded as fundamentally non-comparable due to differing semantics, assumptions, and evaluation practices, leaving their relative merits unclear. Empirical comparisons are further confounded by variations in the underlying predictive models. To clarify this issue, we present a controlled comparative study enabling principled, like-for-like evaluation of the two paradigms. Both representations are constructed from the same finite collection of predictive distributions generated by a shared neural network, isolating representational effects from predictive accuracy. Our study evaluates each representation through the lens of 3 uncertainty measures across 8 benchmarks, including selective prediction and out-of-distribution detection, spanning 6 underlying predictive models and 10 independent runs per configuration. Our results show that meaningful comparison between these seemingly non-comparable frameworks is both feasible and informative, providing insights into how second-order representation choices impact practical uncertainty-aware performance.
Learning Credal Ensembles via Distributionally Robust Optimization
Feb 09, 2026Credal predictors are models that are aware of epistemic uncertainty and produce a convex set of probabilistic predictions. They offer a principled way to quantify predictive epistemic uncertainty (EU) and have been shown to improve model robustness in various settings. However, most state-of-the-art methods mainly define EU as disagreement caused by random training initializations, which mostly reflects sensitivity to optimization randomness rather than uncertainty from deeper sources. To address this, we define EU as disagreement among models trained with varying relaxations of the i.i.d. assumption between training and test data. Based on this idea, we propose CreDRO, which learns an ensemble of plausible models through distributionally robust optimization. As a result, CreDRO captures EU not only from training randomness but also from meaningful disagreement due to potential distribution shifts between training and test data. Empirical results show that CreDRO consistently outperforms existing credal methods on tasks such as out-of-distribution detection across multiple benchmarks and selective classification in medical applications.
Credal Ensemble Distillation for Uncertainty Quantification
Nov 14, 2025Deep ensembles (DE) have emerged as a powerful approach for quantifying predictive uncertainty and distinguishing its aleatoric and epistemic components, thereby enhancing model robustness and reliability. However, their high computational and memory costs during inference pose significant challenges for wide practical deployment. To overcome this issue, we propose credal ensemble distillation (CED), a novel framework that compresses a DE into a single model, CREDIT, for classification tasks. Instead of a single softmax probability distribution, CREDIT predicts class-wise probability intervals that define a credal set, a convex set of probability distributions, for uncertainty quantification. Empirical results on out-of-distribution detection benchmarks demonstrate that CED achieves superior or comparable uncertainty estimation compared to several existing baselines, while substantially reducing inference overhead compared to DE.
Generalized Decision Focused Learning under Imprecise Uncertainty--Theoretical Study
Feb 25, 2025Decision Focused Learning has emerged as a critical paradigm for integrating machine learning with downstream optimisation. Despite its promise, existing methodologies predominantly rely on probabilistic models and focus narrowly on task objectives, overlooking the nuanced challenges posed by epistemic uncertainty, non-probabilistic modelling approaches, and the integration of uncertainty into optimisation constraints. This paper bridges these gaps by introducing innovative frameworks: (i) a non-probabilistic lens for epistemic uncertainty representation, leveraging intervals (the least informative uncertainty model), Contamination (hybrid model), and probability boxes (the most informative uncertainty model); (ii) methodologies to incorporate uncertainty into constraints, expanding Decision-Focused Learning's utility in constrained environments; (iii) the adoption of Imprecise Decision Theory for ambiguity-rich decision-making contexts; and (iv) strategies for addressing sparse data challenges. Empirical evaluations on benchmark optimisation problems demonstrate the efficacy of these approaches in improving decision quality and robustness and dealing with said gaps.
Credal Wrapper of Model Averaging for Uncertainty Estimation on Out-Of-Distribution Detection
May 23, 2024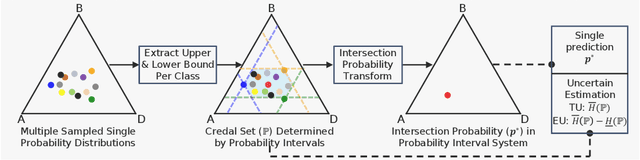



This paper presents an innovative approach, called credal wrapper, to formulating a credal set representation of model averaging for Bayesian neural networks (BNNs) and deep ensembles, capable of improving uncertainty estimation in classification tasks. Given a finite collection of single distributions derived from BNNs or deep ensembles, the proposed approach extracts an upper and a lower probability bound per class, acknowledging the epistemic uncertainty due to the availability of a limited amount of sampled predictive distributions. Such probability intervals over classes can be mapped on a convex set of probabilities (a 'credal set') from which, in turn, a unique prediction can be obtained using a transformation called 'intersection probability transformation'. In this article, we conduct extensive experiments on multiple out-of-distribution (OOD) detection benchmarks, encompassing various dataset pairs (CIFAR10/100 vs SVHN/Tiny-ImageNet, CIFAR10 vs CIFAR10-C, CIFAR100 vs CIFAR100-C and ImageNet vs ImageNet-O) and using different network architectures (such as VGG16, Res18/50, EfficientNet B2, and ViT Base). Compared to BNN and deep ensemble baselines, the proposed credal representation methodology exhibits superior performance in uncertainty estimation and achieves lower expected calibration error on OOD samples.
CreINNs: Credal-Set Interval Neural Networks for Uncertainty Estimation in Classification Tasks
Jan 10, 2024
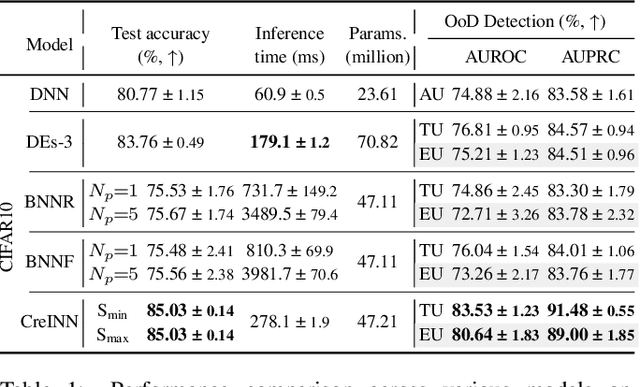
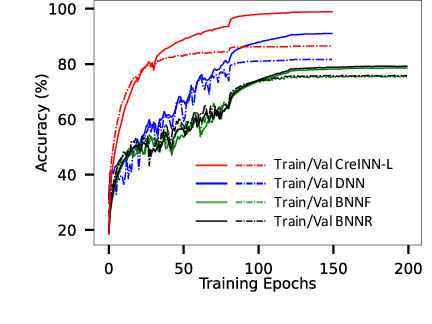
Uncertainty estimation is increasingly attractive for improving the reliability of neural networks. In this work, we present novel credal-set interval neural networks (CreINNs) designed for classification tasks. CreINNs preserve the traditional interval neural network structure, capturing weight uncertainty through deterministic intervals, while forecasting credal sets using the mathematical framework of probability intervals. Experimental validations on an out-of-distribution detection benchmark (CIFAR10 vs SVHN) showcase that CreINNs outperform epistemic uncertainty estimation when compared to variational Bayesian neural networks (BNNs) and deep ensembles (DEs). Furthermore, CreINNs exhibit a notable reduction in computational complexity compared to variational BNNs and demonstrate smaller model sizes than DEs.
An introduction to optimization under uncertainty -- A short survey
Dec 01, 2022Optimization equips engineers and scientists in a variety of fields with the ability to transcribe their problems into a generic formulation and receive optimal solutions with relative ease. Industries ranging from aerospace to robotics continue to benefit from advancements in optimization theory and the associated algorithmic developments. Nowadays, optimization is used in real time on autonomous systems acting in safety critical situations, such as self-driving vehicles. It has become increasingly more important to produce robust solutions by incorporating uncertainty into optimization programs. This paper provides a short survey about the state of the art in optimization under uncertainty. The paper begins with a brief overview of the main classes of optimization without uncertainty. The rest of the paper focuses on the different methods for handling both aleatoric and epistemic uncertainty. Many of the applications discussed in this paper are within the domain of control. The goal of this survey paper is to briefly touch upon the state of the art in a variety of different methods and refer the reader to other literature for more in-depth treatments of the topics discussed here.