 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransparency by Design: Closing the Gap Between Performance and Interpretability in Visual Reasoning
Jul 02, 2018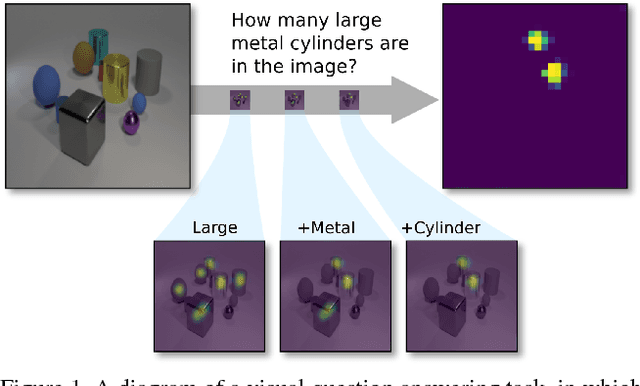

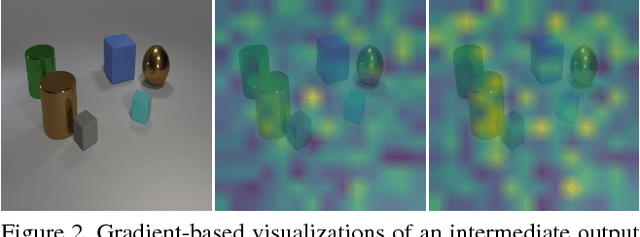
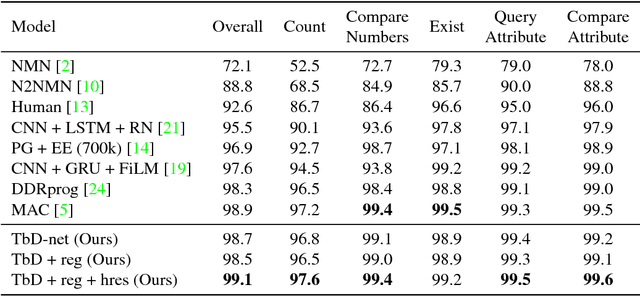
Visual question answering requires high-order reasoning about an image, which is a fundamental capability needed by machine systems to follow complex directives. Recently, modular networks have been shown to be an effective framework for performing visual reasoning tasks. While modular networks were initially designed with a degree of model transparency, their performance on complex visual reasoning benchmarks was lacking. Current state-of-the-art approaches do not provide an effective mechanism for understanding the reasoning process. In this paper, we close the performance gap between interpretable models and state-of-the-art visual reasoning methods. We propose a set of visual-reasoning primitives which, when composed, manifest as a model capable of performing complex reasoning tasks in an explicitly-interpretable manner. The fidelity and interpretability of the primitives' outputs enable an unparalleled ability to diagnose the strengths and weaknesses of the resulting model. Critically, we show that these primitives are highly performant, achieving state-of-the-art accuracy of 99.1% on the CLEVR dataset. We also show that our model is able to effectively learn generalized representations when provided a small amount of data containing novel object attributes. Using the CoGenT generalization task, we show more than a 20 percentage point improvement over the current state of the art.
Machine Learning for Indoor Localization Using Mobile Phone-Based Sensors
May 22, 2015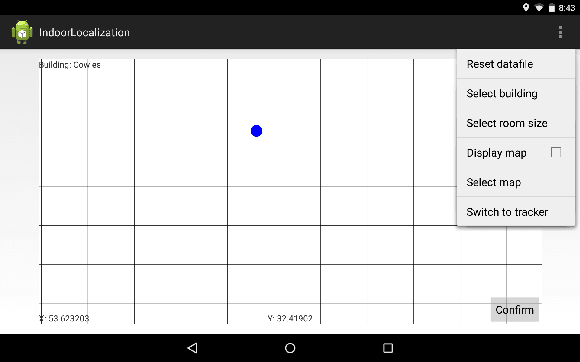
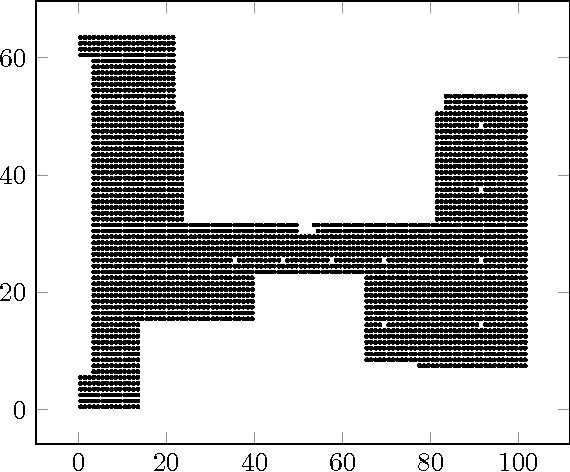
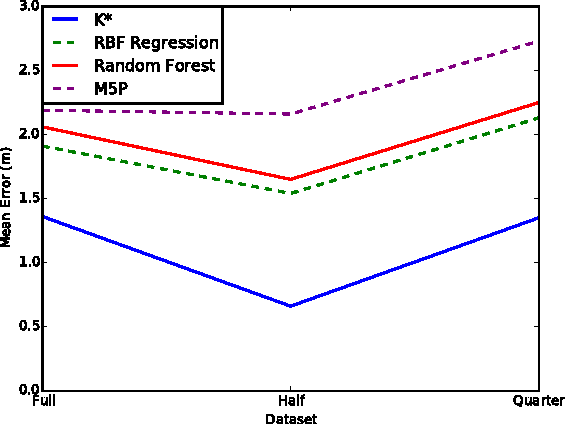
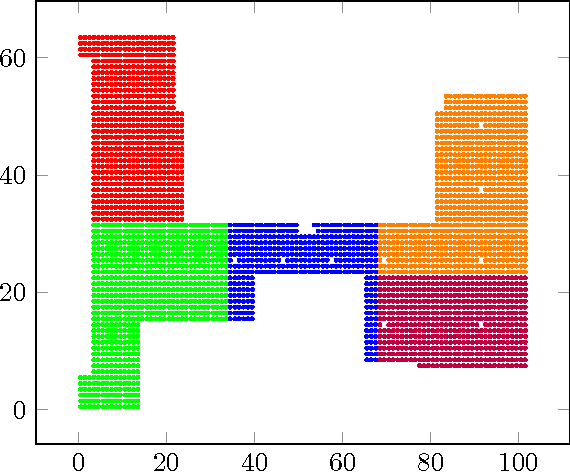
In this paper we investigate the problem of localizing a mobile device based on readings from its embedded sensors utilizing machine learning methodologies. We consider a real-world environment, collect a large dataset of 3110 datapoints, and examine the performance of a substantial number of machine learning algorithms in localizing a mobile device. We have found algorithms that give a mean error as accurate as 0.76 meters, outperforming other indoor localization systems reported in the literature. We also propose a hybrid instance-based approach that results in a speed increase by a factor of ten with no loss of accuracy in a live deployment over standard instance-based methods, allowing for fast and accurate localization. Further, we determine how smaller datasets collected with less density affect accuracy of localization, important for use in real-world environments. Finally, we demonstrate that these approaches are appropriate for real-world deployment by evaluating their performance in an online, in-motion experiment.