 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Extrinsic Self-Calibration of Multiple IMUs using Measurement Subset Selection
Jul 02, 2024This paper addresses the problem of choosing a sparse subset of measurements for quick calibration parameter estimation. A standard solution to this is selecting a measurement only if its utility -- the difference between posterior (with the measurement) and prior information (without the measurement) -- exceeds some threshold. Theoretically, utility, a function of the parameter estimate, should be evaluated at the estimate obtained with all measurements selected so far, hence necessitating a recalibration with each new measurement. However, we hypothesize that utility is insensitive to changes in the parameter estimate for many systems of interest, suggesting that evaluating utility at some initial parameter guess would yield equivalent results in practice. We provide evidence supporting this hypothesis for extrinsic calibration of multiple inertial measurement units (IMUs), showing the reduction in calibration time by two orders of magnitude by forgoing recalibration for each measurement.
Comparative Study of Visual SLAM-Based Mobile Robot Localization Using Fiducial Markers
Sep 08, 2023This paper presents a comparative study of three modes for mobile robot localization based on visual SLAM using fiducial markers (i.e., square-shaped artificial landmarks with a black-and-white grid pattern): SLAM, SLAM with a prior map, and localization with a prior map. The reason for comparing the SLAM-based approaches leveraging fiducial markers is because previous work has shown their superior performance over feature-only methods, with less computational burden compared to methods that use both feature and marker detection without compromising the localization performance. The evaluation is conducted using indoor image sequences captured with a hand-held camera containing multiple fiducial markers in the environment. The performance metrics include absolute trajectory error and runtime for the optimization process per frame. In particular, for the last two modes (SLAM and localization with a prior map), we evaluate their performances by perturbing the quality of prior map to study the extent to which each mode is tolerant to such perturbations. Hardware experiments show consistent trajectory error levels across the three modes, with the localization mode exhibiting the shortest runtime among them. Yet, with map perturbations, SLAM with a prior map maintains performance, while localization mode degrades in both aspects.
Extrinsic Calibration of Multiple Inertial Sensors from Arbitrary Trajectories
May 29, 2022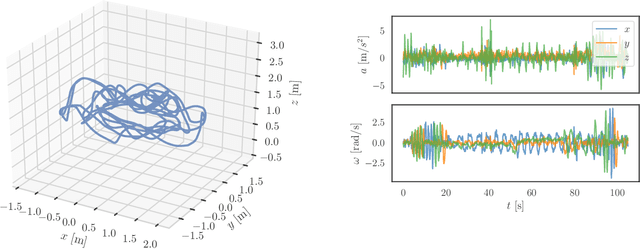
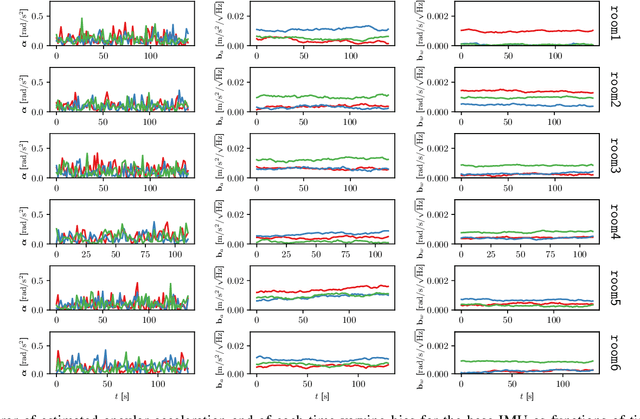
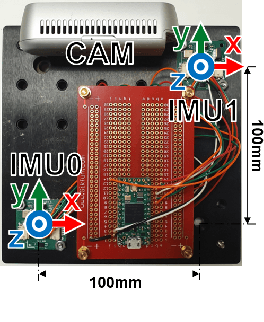
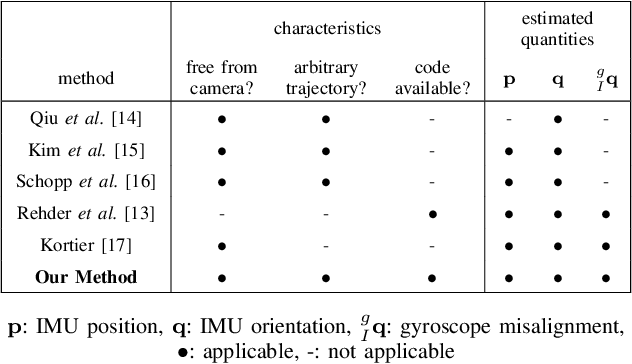
We present a method of extrinsic calibration for a system of multiple inertial measurement units (IMUs) that estimates the relative pose of each IMU on a rigid body using only measurements from the IMUs themselves, without the need to prescribe the trajectory. Our method is based on solving a nonlinear least-squares problem that penalizes inconsistency between measurements from pairs of IMUs. We validate our method with experiments both in simulation and in hardware. In particular, we show that it meets or exceeds the performance -- in terms of error, success rate, and computation time -- of an existing, state-of-the-art method that does not rely only on IMU measurements and instead requires the use of a camera and a fiducial marker. We also show that the performance of our method is largely insensitive to the choice of trajectory along which IMU measurements are collected.
* RA-L with ICRA 2022