 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtrinsic Calibration of Multiple Inertial Sensors from Arbitrary Trajectories
Paper and Code
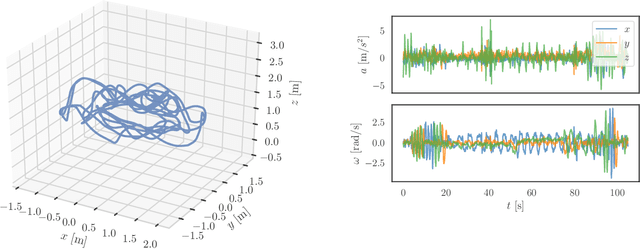
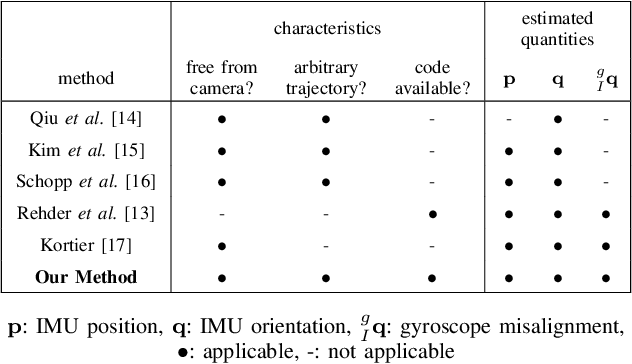
We present a method of extrinsic calibration for a system of multiple inertial measurement units (IMUs) that estimates the relative pose of each IMU on a rigid body using only measurements from the IMUs themselves, without the need to prescribe the trajectory. Our method is based on solving a nonlinear least-squares problem that penalizes inconsistency between measurements from pairs of IMUs. We validate our method with experiments both in simulation and in hardware. In particular, we show that it meets or exceeds the performance -- in terms of error, success rate, and computation time -- of an existing, state-of-the-art method that does not rely only on IMU measurements and instead requires the use of a camera and a fiducial marker. We also show that the performance of our method is largely insensitive to the choice of trajectory along which IMU measurements are collected.