 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Machine Interfaces for Subsea Telerobotics: From Soda-straw to Natural Language Interactions
Dec 02, 2024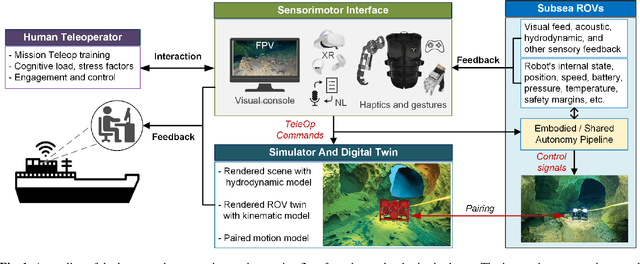
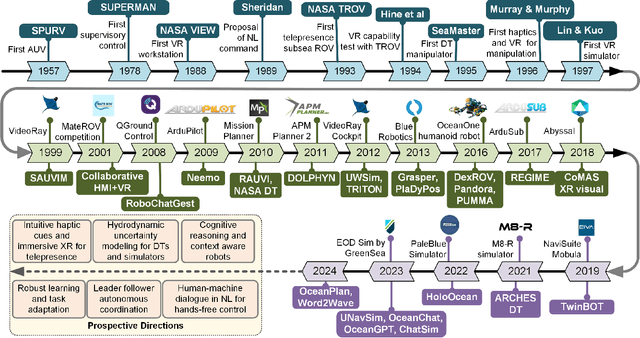
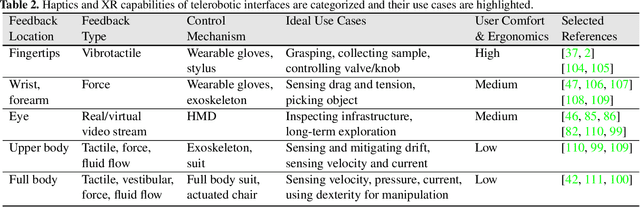
This review explores the evolution of human-machine interfaces (HMIs) for subsea telerobotics, tracing back the transition from traditional first-person "soda-straw" consoles (narrow field-of-view camera feed) to advanced interfaces powered by gesture recognition, virtual reality, and natural language models. First, we discuss various forms of subsea telerobotics applications, current state-of-the-art (SOTA) interface systems, and the challenges they face in robust underwater sensing, real-time estimation, and low-latency communication. Through this analysis, we highlight how advanced HMIs facilitate intuitive interactions between human operators and robots to overcome these challenges. A detailed review then categorizes and evaluates the cutting-edge HMI systems based on their offered features from both human perspectives (e.g., enhancing operator control and situational awareness) and machine perspectives (e.g., improving safety, mission accuracy, and task efficiency). Moreover, we examine the literature on bidirectional interaction and intelligent collaboration in terms of sensory feedback and intuitive control mechanisms for both physical and virtual interfaces. The paper concludes by identifying critical challenges, open research questions, and future directions, emphasizing the need for multidisciplinary collaboration in subsea telerobotics.
Word2Wave: Language Driven Mission Programming for Efficient Subsea Deployments of Marine Robots
Sep 27, 2024



This paper explores the design and development of a language-based interface for dynamic mission programming of autonomous underwater vehicles (AUVs). The proposed 'Word2Wave' (W2W) framework enables interactive programming and parameter configuration of AUVs for remote subsea missions. The W2W framework includes: (i) a set of novel language rules and command structures for efficient language-to-mission mapping; (ii) a GPT-based prompt engineering module for training data generation; (iii) a small language model (SLM)-based sequence-to-sequence learning pipeline for mission command generation from human speech or text; and (iv) a novel user interface for 2D mission map visualization and human-machine interfacing. The proposed learning pipeline adapts an SLM named T5-Small that can learn language-to-mission mapping from processed language data effectively, providing robust and efficient performance. In addition to a benchmark evaluation with state-of-the-art, we conduct a user interaction study to demonstrate the effectiveness of W2W over commercial AUV programming interfaces. Across participants, W2W-based programming required less than 10% time for mission programming compared to traditional interfaces; it is deemed to be a simpler and more natural paradigm for subsea mission programming with a usability score of 76.25. W2W opens up promising future research opportunities on hands-free AUV mission programming for efficient subsea deployments.