 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeE-Scooter Rider Detection and Classification in Dense Urban Environments
May 20, 2022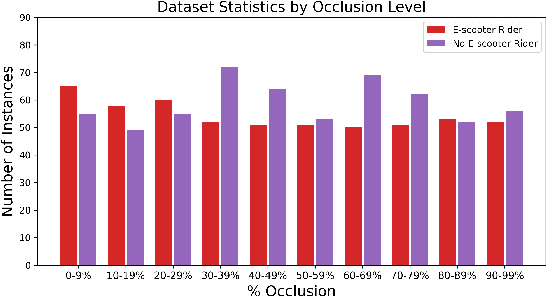

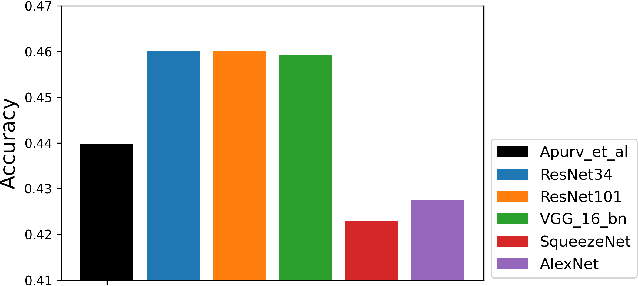
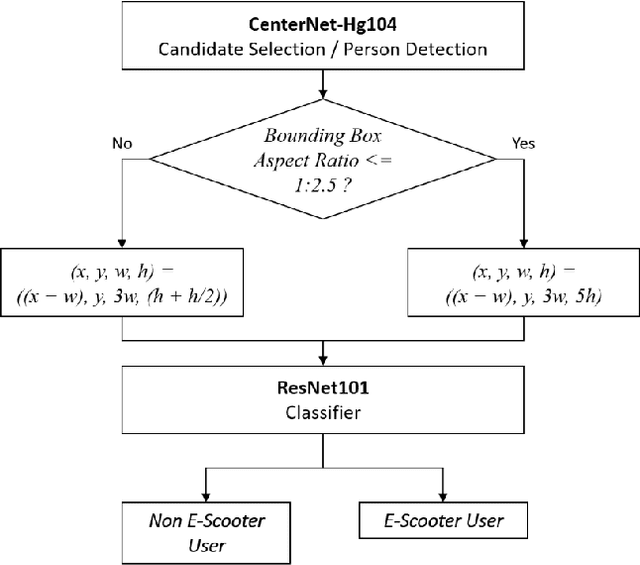
Accurate detection and classification of vulnerable road users is a safety critical requirement for the deployment of autonomous vehicles in heterogeneous traffic. Although similar in physical appearance to pedestrians, e-scooter riders follow distinctly different characteristics of movement and can reach speeds of up to 45kmph. The challenge of detecting e-scooter riders is exacerbated in urban environments where the frequency of partial occlusion is increased as riders navigate between vehicles, traffic infrastructure and other road users. This can lead to the non-detection or mis-classification of e-scooter riders as pedestrians, providing inaccurate information for accident mitigation and path planning in autonomous vehicle applications. This research introduces a novel benchmark for partially occluded e-scooter rider detection to facilitate the objective characterization of detection models. A novel, occlusion-aware method of e-scooter rider detection is presented that achieves a 15.93% improvement in detection performance over the current state of the art.
The Impact of Partial Occlusion on Pedestrian Detectability
May 12, 2022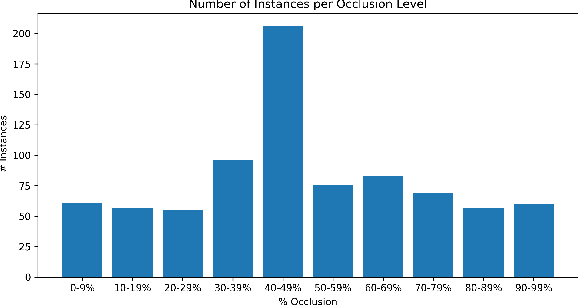

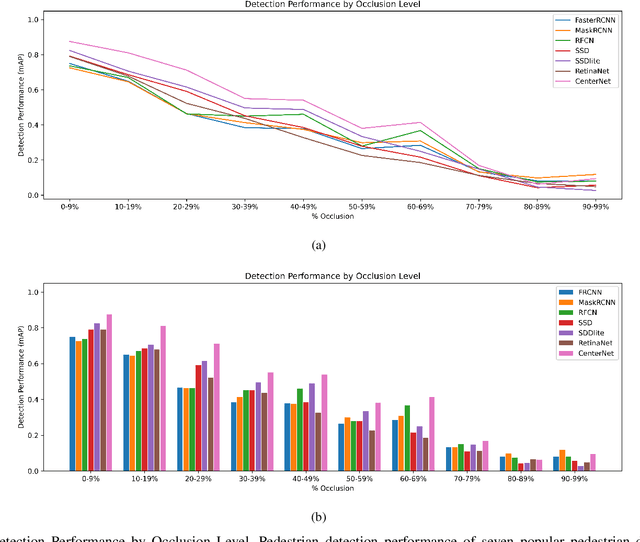
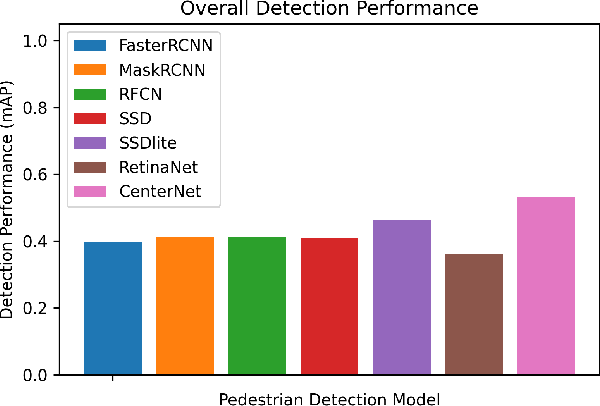
Robust detection of vulnerable road users is a safety critical requirement for the deployment of autonomous vehicles in heterogeneous traffic. One of the most complex outstanding challenges is that of partial occlusion where a target object is only partially available to the sensor due to obstruction by another foreground object. A number of leading pedestrian detection benchmarks provide annotation for partial occlusion, however each benchmark varies greatly in their definition of the occurrence and severity of occlusion. Recent research demonstrates that a high degree of subjectivity is used to classify occlusion level in these cases and occlusion is typically categorized into 2 to 3 broad categories such as partially and heavily occluded. This can lead to inaccurate or inconsistent reporting of pedestrian detection model performance depending on which benchmark is used. This research introduces a novel, objective benchmark for partially occluded pedestrian detection to facilitate the objective characterization of pedestrian detection models. Characterization is carried out on seven popular pedestrian detection models for a range of occlusion levels from 0-99%. Results demonstrate that pedestrian detection performance degrades, and the number of false negative detections increase as pedestrian occlusion level increases. Of the seven popular pedestrian detection routines characterized, CenterNet has the greatest overall performance, followed by SSDlite. RetinaNet has the lowest overall detection performance across the range of occlusion levels.
An Objective Method for Pedestrian Occlusion Level Classification
May 11, 2022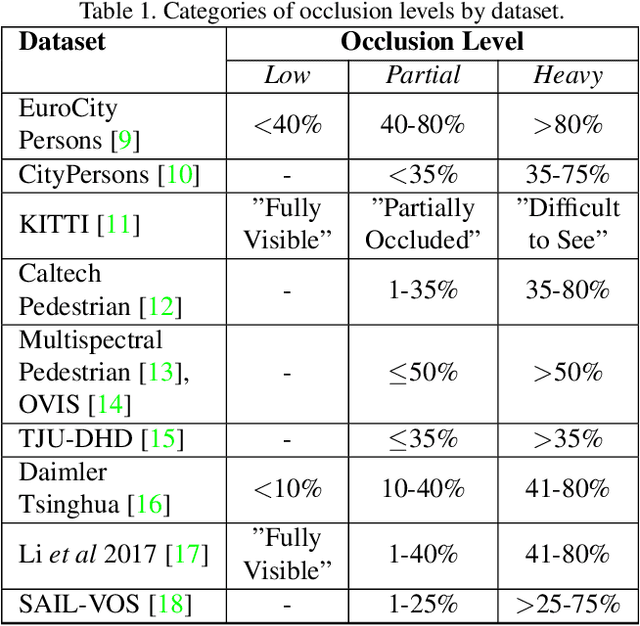
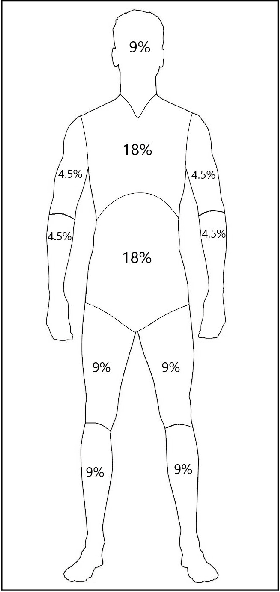
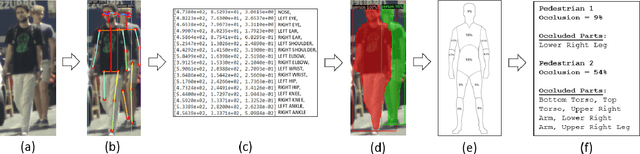
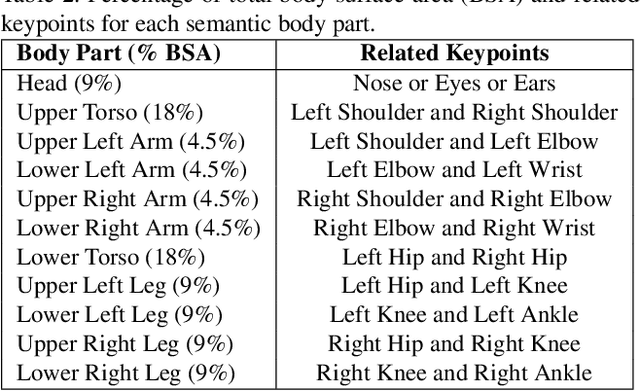
Pedestrian detection is among the most safety-critical features of driver assistance systems for autonomous vehicles. One of the most complex detection challenges is that of partial occlusion, where a target object is only partially available to the sensor due to obstruction by another foreground object. A number of current pedestrian detection benchmarks provide annotation for partial occlusion to assess algorithm performance in these scenarios, however each benchmark varies greatly in their definition of the occurrence and severity of occlusion. In addition, current occlusion level annotation methods contain a high degree of subjectivity by the human annotator. This can lead to inaccurate or inconsistent reporting of an algorithm's detection performance for partially occluded pedestrians, depending on which benchmark is used. This research presents a novel, objective method for pedestrian occlusion level classification for ground truth annotation. Occlusion level classification is achieved through the identification of visible pedestrian keypoints and through the use of a novel, effective method of 2D body surface area estimation. Experimental results demonstrate that the proposed method reflects the pixel-wise occlusion level of pedestrians in images and is effective for all forms of occlusion, including challenging edge cases such as self-occlusion, truncation and inter-occluding pedestrians.