 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProceedings of the First Workshop on Agents and Robots for reliable Engineered Autonomy
Jul 22, 2020This volume contains the proceedings of the First Workshop on Agents and Robots for reliable Engineered Autonomy (AREA 2020), co-located with the 24th European Conference on Artificial Intelligence (ECAI 2020). AREA brings together researchers from autonomous agents, software engineering and robotic communities, as combining knowledge coming from these research areas may lead to innovative approaches that solve complex problems related with the verification and validation of autonomous robotic systems.
OntoScene, A Logic-based Scene Interpreter: Implementation and Application in the Rock Art Domain
Nov 05, 2019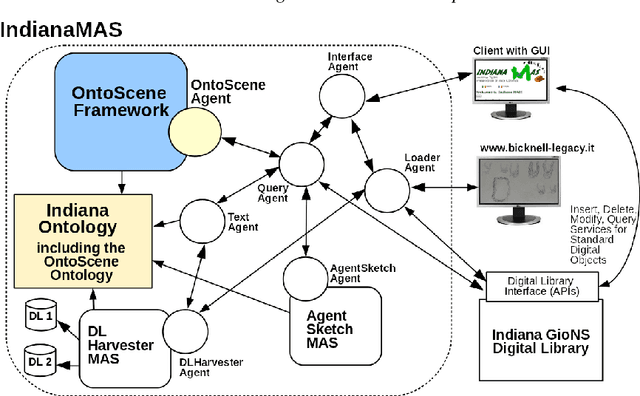
We present OntoScene, a framework aimed at understanding the semantics of visual scenes starting from the semantics of their elements and the spatial relations holding between them. OntoScene exploits ontologies for representing knowledge and Prolog for specifying the interpretation rules that domain experts may adopt, and for implementing the SceneInterpreter engine. Ontologies allow the designer to formalize the domain in a reusable way, and make the system modular and interoperable with existing multiagent systems, while Prolog provides a solid basis to define complex rules of interpretation in a way that can be affordable even for people with no background in Computational Logics. The domain selected for experimenting OntoScene is that of prehistoric rock art, which provides us with a fascinating and challenging testbed. Under consideration in Theory and Practice of Logic Programming (TPLP)