 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Ontological Model of User Preferences
Oct 29, 2023The notion of preferences plays an important role in many disciplines including service robotics which is concerned with scenarios in which robots interact with humans. These interactions can be favored by robots taking human preferences into account. This raises the issue of how preferences should be represented to support such preference-aware decision making. Several formal accounts for a notion of preferences exist. However, these approaches fall short on defining the nature and structure of the options that a robot has in a given situation. In this work, we thus investigate a formal model of preferences where options are non-atomic entities that are defined by the complex situations they bring about.
Towards a Neuronally Consistent Ontology for Robotic Agents
Sep 26, 2023The Collaborative Research Center for Everyday Activity Science & Engineering (CRC EASE) aims to enable robots to perform environmental interaction tasks with close to human capacity. It therefore employs a shared ontology to model the activity of both kinds of agents, empowering robots to learn from human experiences. To properly describe these human experiences, the ontology will strongly benefit from incorporating characteristics of neuronal information processing which are not accessible from a behavioral perspective alone. We, therefore, propose the analysis of human neuroimaging data for evaluation and validation of concepts and events defined in the ontology model underlying most of the CRC projects. In an exploratory analysis, we employed an Independent Component Analysis (ICA) on functional Magnetic Resonance Imaging (fMRI) data from participants who were presented with the same complex video stimuli of activities as robotic and human agents in different environments and contexts. We then correlated the activity patterns of brain networks represented by derived components with timings of annotated event categories as defined by the ontology model. The present results demonstrate a subset of common networks with stable correlations and specificity towards particular event classes and groups, associated with environmental and contextual factors. These neuronal characteristics will open up avenues for adapting the ontology model to be more consistent with human information processing.
Foundations of the Socio-physical Model of Activities for Autonomous Robotic Agents
Nov 24, 2020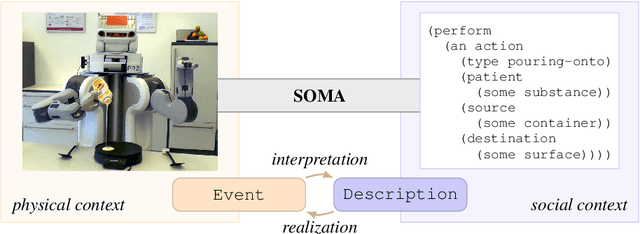
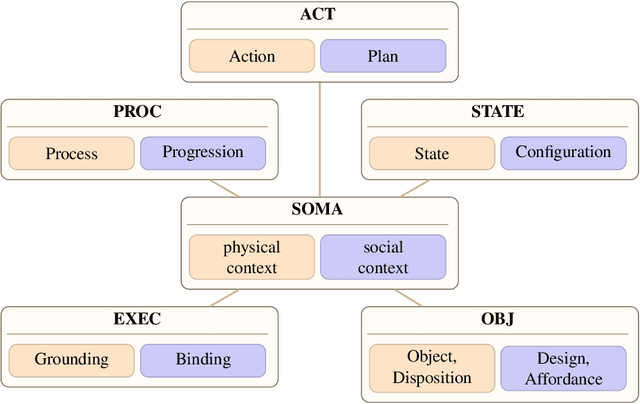
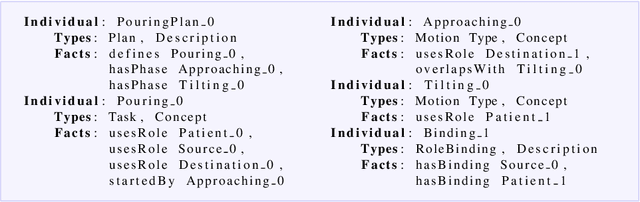

In this paper, we present foundations of the Socio-physical Model of Activities (SOMA). SOMA represents both the physical as well as the social context of everyday activities. Such tasks seem to be trivial for humans, however, they pose severe problems for artificial agents. For starters, a natural language command requesting something will leave many pieces of information necessary for performing the task unspecified. Humans can solve such problems fast as we reduce the search space by recourse to prior knowledge such as a connected collection of plans that describe how certain goals can be achieved at various levels of abstraction. Rather than enumerating fine-grained physical contexts SOMA sets out to include socially constructed knowledge about the functions of actions to achieve a variety of goals or the roles objects can play in a given situation. As the human cognition system is capable of generalizing experiences into abstract knowledge pieces applicable to novel situations, we argue that both physical and social context need be modeled to tackle these challenges in a general manner. This is represented by the link between the physical and social context in SOMA where relationships are established between occurrences and generalizations of them, which has been demonstrated in several use cases that validate SOMA.