 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMiniature Fibre-Optic based Shape Sensing for Robotic Applications using Curved Reflectors
Jul 22, 2024continuum-robots, prosthetic devices and wearable body-shape sensors. A miniaturised one-degree-of-freedom joint-angle sensor is devised, using a single light emitting/receiving optical fibre with a coupler connected to a Keyence (FS-N11MN, Osaka, Japan) sensor that supplies and detects light through the optical fibres. A curvature-varying reflective surface integrated in the joint demonstrates non-contact light intensity-based sensing. Various reflector geometries and surface colours are designed to compare sensor output for achieving a large angle range and improved sensitivity for the proposed miniaturised robotic shape-sensing applications.
Gel-OPTOFORT Sensor: Multi-axis Force/Torque Measurement and Geometry Observation Using GelSight and Optoelectronic Sensor Technology
Jul 22, 2024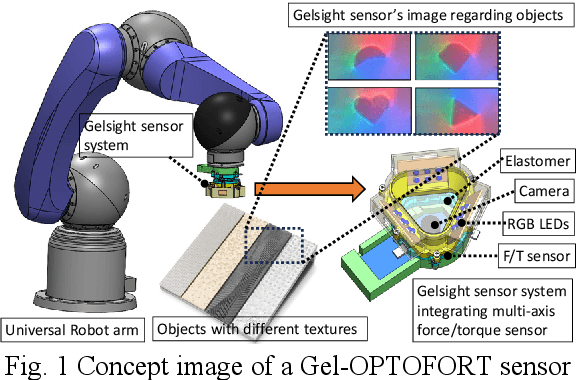
Although conventional GelSight-based tactile and force/torque sensors excel in detecting objects' geometry and texture information while simultaneously sensing multi-axis forces, their performance is limited by the camera's lower frame rates and the inherent properties of the elastomer. These limitations restrict their ability to measure higher force ranges at high sampling frequencies. Besides, due to the coupling of the Gelsight sensor unit and multi-axis force/torque unit structurally, the force/torque measurement ranges of the Gelsight-based force/torque sensors are not adjustable. To address these weaknesses, this paper proposes the GEL-OPTOFORT sensor that combines a GelSight sensor and an optoelectronic sensor-based force/torque sensor.
Shape Sensing for Continuum Robotics using Optoelectronic Sensors with Convex Reflectors
Mar 18, 2024



Three-dimensional shape sensing in soft and continuum robotics is a crucial aspect for stable actuation and control in fields such as Minimally Invasive surgery, as the estimation of complex curvatures while using continuum robotic tools is required to manipulate through fragile paths. This challenge has been addressed using a range of different sensing techniques, for example, Fibre Bragg grating (FBG) technology, inertial measurement unit (IMU) sensor networks or stretch sensors. Previously, an optics-based method, using optoelectronic sensors was explored, offering a simple and cost-effective solution for shape sensing in a flexible tendon-actuated manipulator in two orientations. This was based on proximity-modulated angle estimation and has been the basis for the shape-sensing method addressed in this paper. The improved and miniaturized technique demonstrated in this paper is based on the use of a spherically shaped reflector with optoelectronic sensors integrated into a tendon actuated robotic manipulator. Upgraded sensing capability is achieved using optimization of the spherical reflector shape in terms of sensor range and resolution, and improved calibration is achieved through the integration of spherical bearings for friction-free motion. Shape estimation is achieved in two orientations upon calibration of sensors, with a maximum Root Mean Square Error (RMS) of 3.37{\deg}.