 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGel-OPTOFORT Sensor: Multi-axis Force/Torque Measurement and Geometry Observation Using GelSight and Optoelectronic Sensor Technology
Paper and Code
Jul 22, 2024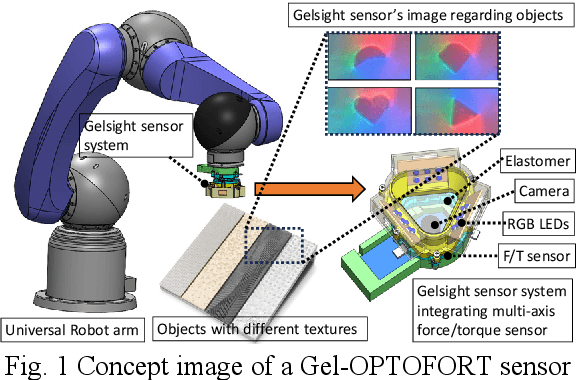
Although conventional GelSight-based tactile and force/torque sensors excel in detecting objects' geometry and texture information while simultaneously sensing multi-axis forces, their performance is limited by the camera's lower frame rates and the inherent properties of the elastomer. These limitations restrict their ability to measure higher force ranges at high sampling frequencies. Besides, due to the coupling of the Gelsight sensor unit and multi-axis force/torque unit structurally, the force/torque measurement ranges of the Gelsight-based force/torque sensors are not adjustable. To address these weaknesses, this paper proposes the GEL-OPTOFORT sensor that combines a GelSight sensor and an optoelectronic sensor-based force/torque sensor.