 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Whole-body Obstacle Avoidance for 7-DOF Redundant Manipulators
Dec 29, 2020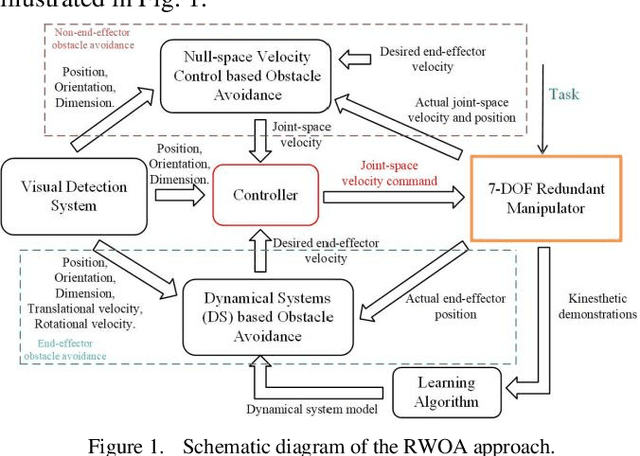
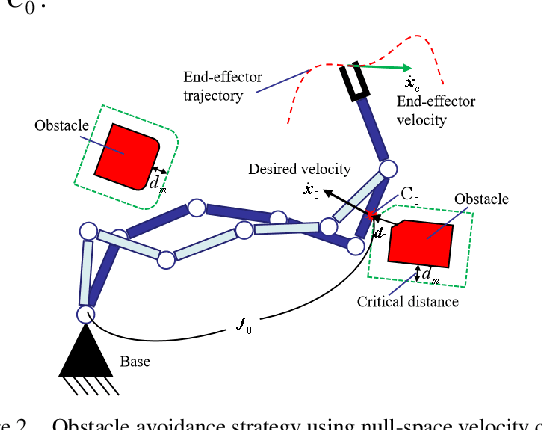
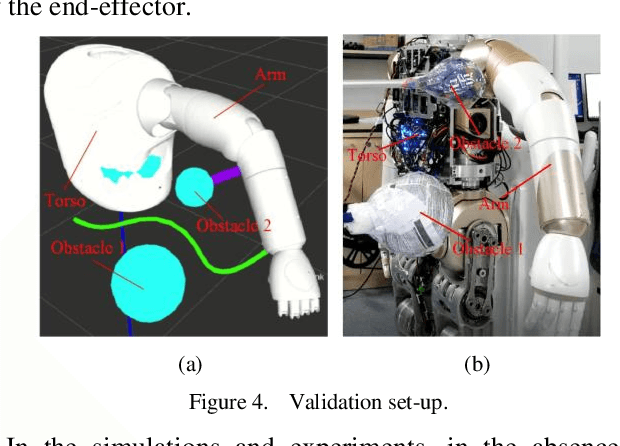
Mainly because of the heavy computational costs, the real-time whole-body obstacle avoidance for the redundant manipulators has not been well implemented. This paper presents an approach that can ensure that the whole-body of a redundant manipulator can avoid moving obstacles in real-time during the execution of a task. The manipulator is divided into end-effector and non-end-effector portion. Based on dynamical systems (DS), the real-time end-effector obstacle avoidance is obtained. Besides, the end-effector can reach the given target. By using null-space velocity control, the real-time non-endeffector obstacle avoidance is achieved. Finally, a controller is designed to ensure the whole-body obstacle avoidance. We validate the effectiveness of the method in the simulations and experiments on the 7-DOF arm of the UBTECH humanoid robot.
Dynamical Systems based Obstacle Avoidance with Workspace Constraint for Manipulators
Dec 29, 2020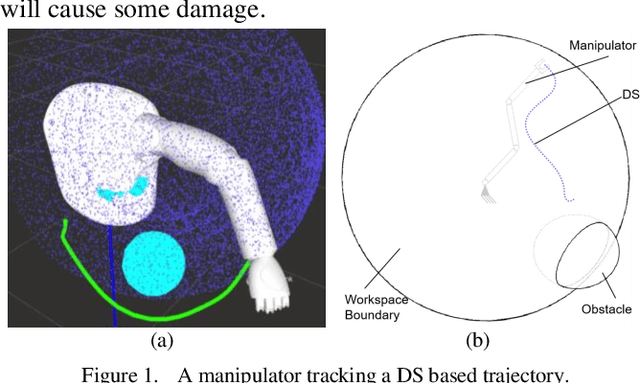
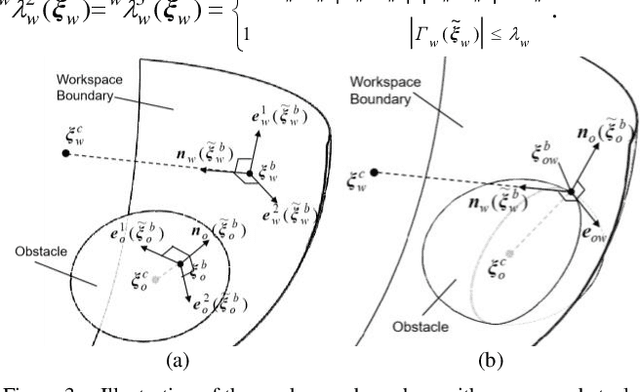
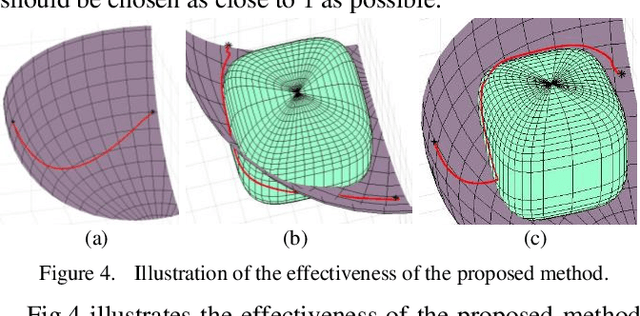
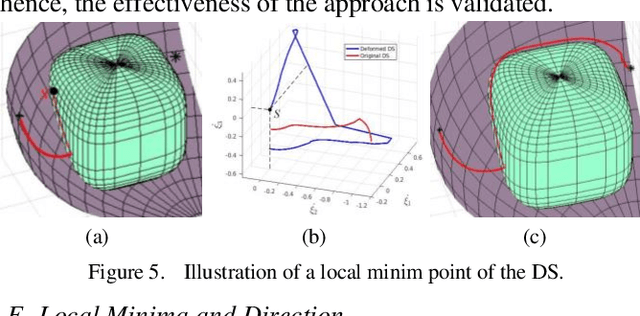
In this paper, based on Dynamical Systems (DS), we present an obstacle avoidance method that take into account workspace constraint for serial manipulators. Two modulation matrices that consider the effect of an obstacle and the workspace of a manipulator are determined when the obstacle does not intersect the workspace boundary and when the obstacle intersects the workspace boundary respectively. Using the modulation matrices, an original DS is deformed. The proposed approach can ensure that the trajectory of the manipulator computed according to the deformed DS neither penetrate the obstacle nor go out of the workspace. We validate the effectiveness of the approach in the simulations and experiments on the left arm of the UBTECH humanoid robot.