 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Accessibility Capability Boundary: Operational Limits and Expansion Potential of AI-Generated Browser-Native Accessibility Systems
May 19, 2026As large language models (LLMs) demonstrate increasing competence in synthesizing functional user interfaces, a fundamental question emerges in accessibility computing: \textit{how far can AI-driven accessibility systems go?} This paper introduces the \textit{Accessibility Capability Boundary} (ACB), a formal framework for reasoning about the operational limits and expansion potential of autonomous accessibility systems, and grounds this theory in a real-world systems artifact. We model accessibility not as a binary compliance property but as a dynamic, multidimensional capability space constrained by measurable variables including deployment latency, cognitive load, infrastructure dependency, offline persistence, interaction complexity, and adaptability. We argue that AI-generated, browser-native systems constructed as single-file HTML artifacts leveraging standard browser APIs may dramatically shift the ACB outward by reducing deployment friction to near-zero and enabling rapid, context-specific interface adaptation. We ground our theoretical framework in the analysis of two real-world exploratory prototypes. The first is an AI-generated browser-native accessibility interface deployed for a blind user in Nepal. The second is a fully functional, open-source webcam alignment assistant for visually impaired users, serving as a concrete systems artifact. Through formal definitions, propositions, and a comparative evaluation matrix, we characterize the regions of the accessibility capability space that such systems can and cannot reach. We further identify remaining computational, infrastructural, and verification constraints that constitute the hard boundaries of this paradigm. This work contributes a theoretical foundation for understanding the scalable limits of autonomous accessibility computing and proposes a research agenda for future work in accessibility-aware AI systems.
Comparison of Lightweight Methods for Vehicle Dynamics-Based Driver Drowsiness Detection
Jun 08, 2025Driver drowsiness detection (DDD) prevents road accidents caused by driver fatigue. Vehicle dynamics-based DDD has been proposed as a method that is both economical and high performance. However, there are concerns about the reliability of performance metrics and the reproducibility of many of the existing methods. For instance, some previous studies seem to have a data leakage issue among training and test datasets, and many do not openly provide the datasets they used. To this end, this paper aims to compare the performance of representative vehicle dynamics-based DDD methods under a transparent and fair framework that uses a public dataset. We first develop a framework for extracting features from an open dataset by Aygun et al. and performing DDD with lightweight ML models; the framework is carefully designed to support a variety of onfigurations. Second, we implement three existing representative methods and a concise random forest (RF)-based method in the framework. Finally, we report the results of experiments to verify the reproducibility and clarify the performance of DDD based on common metrics. Among the evaluated methods, the RF-based method achieved the highest accuracy of 88 %. Our findings imply the issues inherent in DDD methods developed in a non-standard manner, and demonstrate a high performance method implemented appropriately.
Scalable Parallel Numerical Constraint Solver Using Global Load Balancing
May 18, 2015We present a scalable parallel solver for numerical constraint satisfaction problems (NCSPs). Our parallelization scheme consists of homogeneous worker solvers, each of which runs on an available core and communicates with others via the global load balancing (GLB) method. The parallel solver is implemented with X10 that provides an implementation of GLB as a library. In experiments, several NCSPs from the literature were solved and attained up to 516-fold speedup using 600 cores of the TSUBAME2.5 supercomputer.
Scalable Parallel Numerical CSP Solver
Nov 06, 2014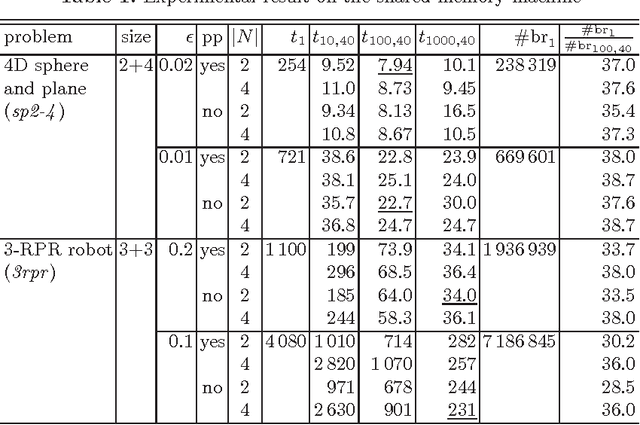
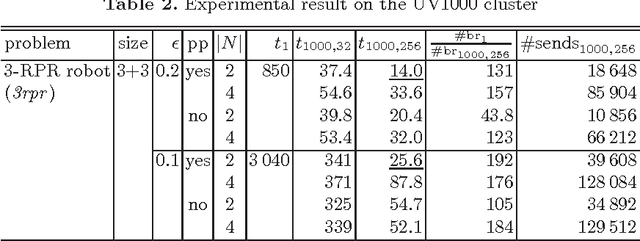
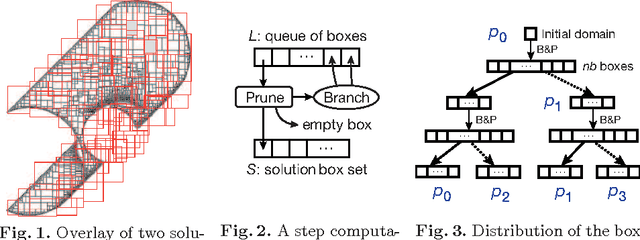
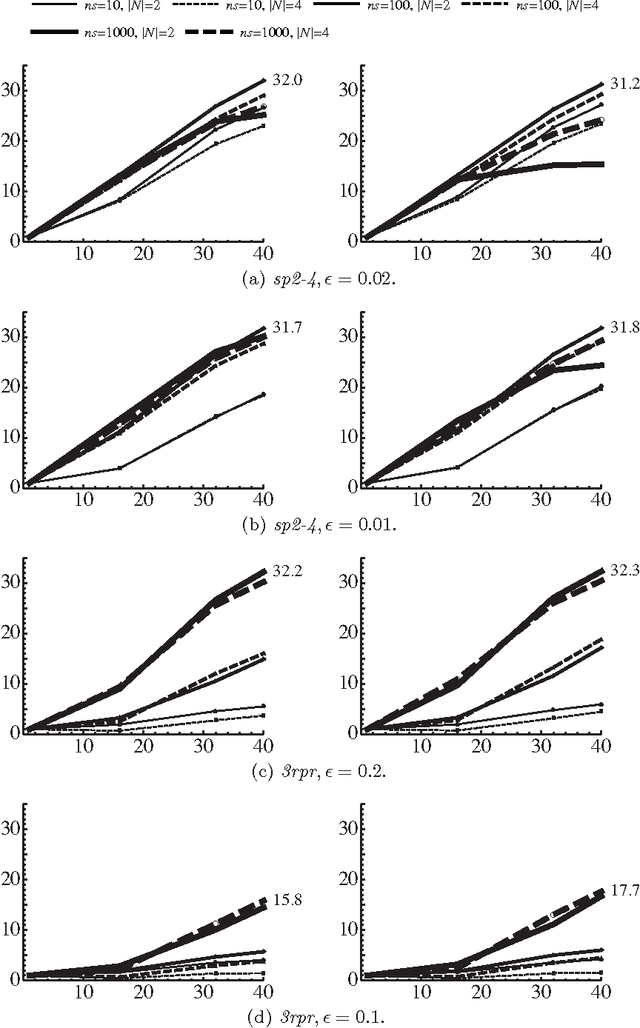
We present a parallel solver for numerical constraint satisfaction problems (NCSPs) that can scale on a number of cores. Our proposed method runs worker solvers on the available cores and simultaneously the workers cooperate for the search space distribution and balancing. In the experiments, we attained up to 119-fold speedup using 256 cores of a parallel computer.