 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReservoir Predictive Path Integral Control for Unknown Nonlinear Dynamics
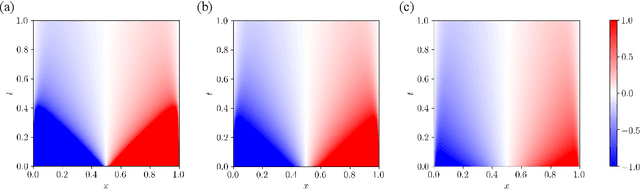
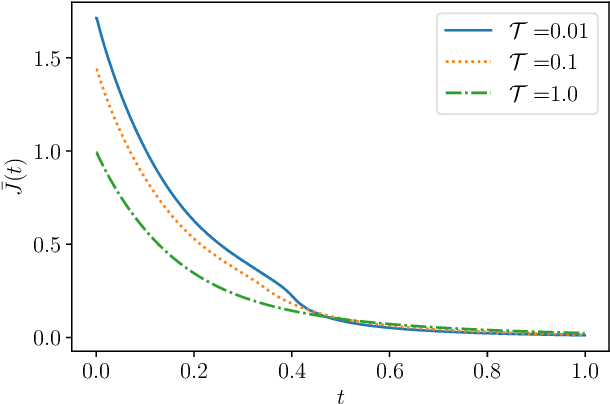
Sep 04, 2025Neural networks capable of approximating complex nonlinearities have found extensive application in data-driven control of nonlinear dynamical systems. However, fast online identification and control of unknown dynamics remain central challenges. This paper integrates echo-state networks (ESNs) -- reservoir computing models implemented with recurrent neural networks -- and model predictive path integral (MPPI) control -- sampling-based variants of model predictive control -- to meet these challenges. The proposed reservoir predictive path integral (RPPI) enables fast learning of nonlinear dynamics with ESN and exploits the learned nonlinearities directly in parallelized MPPI control computation without linearization approximations. The framework is further extended to uncertainty-aware RPPI (URPPI), which leverages ESN uncertainty to balance exploration and exploitation: exploratory inputs dominate during early learning, while exploitative inputs prevail as model confidence grows. Experiments on controlling the Duffing oscillator and four-tank systems demonstrate that URPPI improves control performance, reducing control costs by up to 60% compared to traditional quadratic programming-based model predictive control methods.
Predicting unobserved climate time series data at distant areas via spatial correlation using reservoir computing
Jun 05, 2024Collecting time series data spatially distributed in many locations is often important for analyzing climate change and its impacts on ecosystems. However, comprehensive spatial data collection is not always feasible, requiring us to predict climate variables at some locations. This study focuses on a prediction of climatic elements, specifically near-surface temperature and pressure, at a target location apart from a data observation point. Our approach uses two prediction methods: reservoir computing (RC), known as a machine learning framework with low computational requirements, and vector autoregression models (VAR), recognized as a statistical method for analyzing time series data. Our results show that the accuracy of the predictions degrades with the distance between the observation and target locations. We quantitatively estimate the distance in which effective predictions are possible. We also find that in the context of climate data, a geographical distance is associated with data correlation, and a strong data correlation significantly improves the prediction accuracy with RC. In particular, RC outperforms VAR in predicting highly correlated data within the predictive range. These findings suggest that machine learning-based methods can be used more effectively to predict climatic elements in remote locations by assessing the distance to them from the data observation point in advance. Our study on low-cost and accurate prediction of climate variables has significant value for climate change strategies.
Optimal Transport-based Coverage Control for Swarm Robot Systems: Generalization of the Voronoi Tessellation-based Method
Nov 16, 2020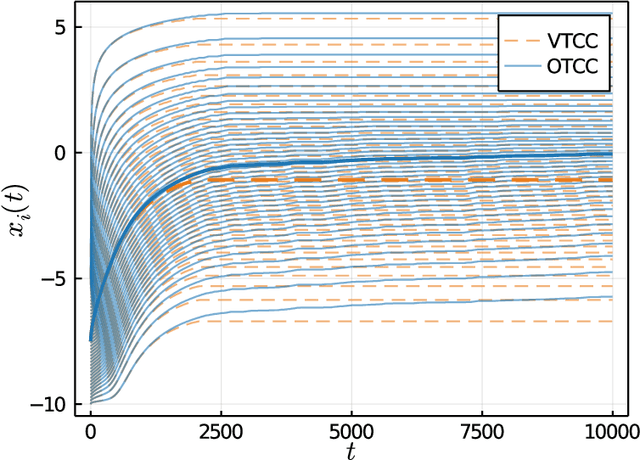
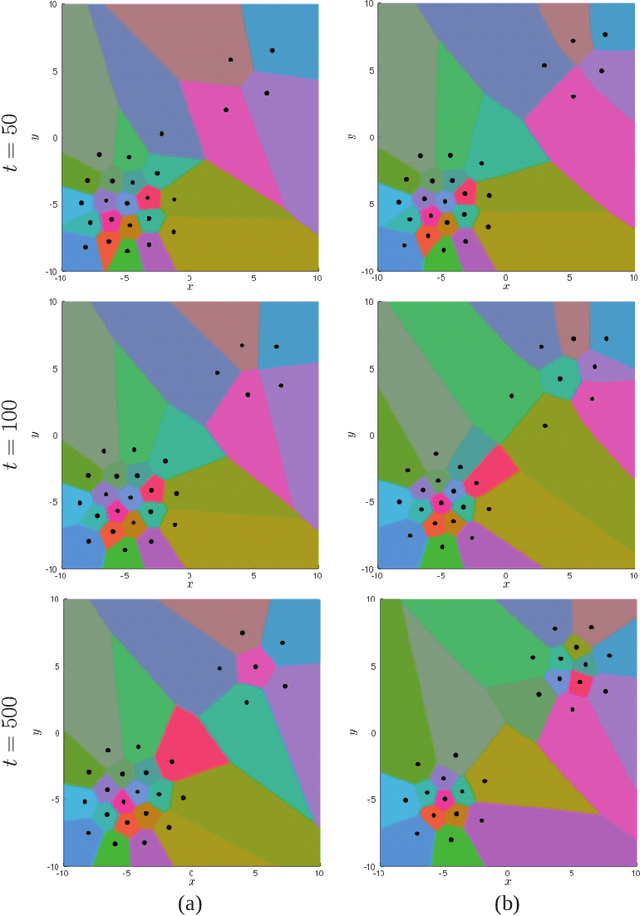
Swarm robot systems, which consist of many cooperating mobile robots, have attracted attention for their environmental adaptability and fault tolerance advantages. One of the most important tasks for such systems is coverage control, in which robots autonomously deploy to approximate a given spatial distribution. In this study, we formulate a coverage control paradigm using the concept of optimal transport and propose a novel control technique, which we have termed the optimal transport-based coverage control (OTCC) method. The proposed OTCC, derived via the gradient flow of the cost function in the Kantorovich dual problem, is shown to covers a widely used existing control method as a special case. We also perform a Lyapunov stability analysis of the controlled system, and provide numerical calculations to show that the OTCC reproduces target distributions with better performance than the existing control method.
Optimal Coverage Control for Swarm Robot Systems using a Mean Field Game
Apr 16, 2020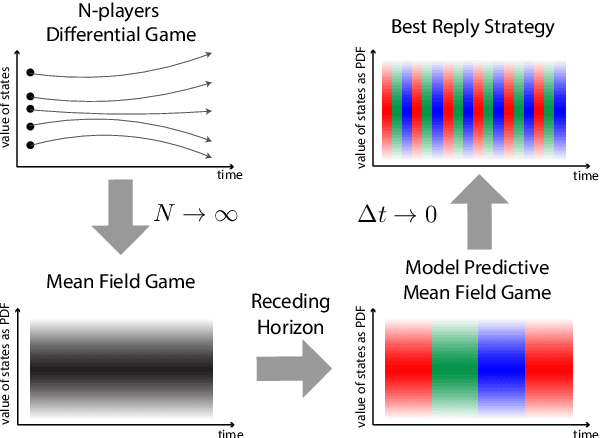
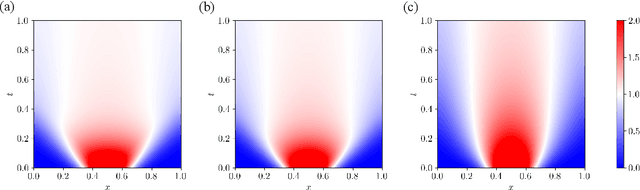
Swarm robot systems, in which many robots cooperate to perform one task, have attracted a great of attention in recent years. In controlling these systems, the trade-off between the global optimality and the scalability is a major challenge. In the present paper, we focus on the mean field game (MFG) as a possible control method for swarm robot systems. The MFG is a framework to deduce a macroscopic model for describing robot density profiles from the microscopic robot dynamics. For a coverage control problem aiming at uniformly distributing robots over space, we extend the original MFG in order to present two methods for optimally controlling swarm robots: the model predictive mean field game (MP-MFG) and the best reply strategy (BRS). Importantly, the MP-MFG converges to the BRS in the limit of prediction time going to zero, which is also confirmed by our numerical experiments. In addition, we show numerically that the optimal input is obtained in both the MP-MFG and the BRS, and widening the prediction time of the MP-MFG improves the control performance.