 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time and Continuous Hand Gesture Spotting: an Approach Based on Artificial Neural Networks
Sep 09, 2013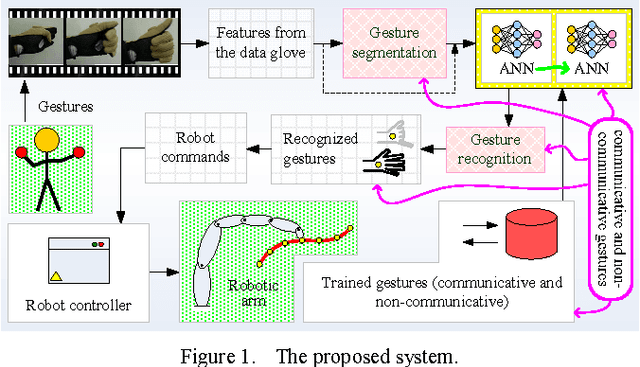
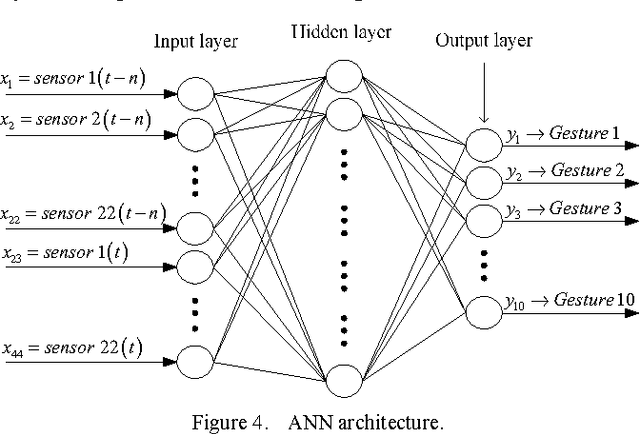
New and more natural human-robot interfaces are of crucial interest to the evolution of robotics. This paper addresses continuous and real-time hand gesture spotting, i.e., gesture segmentation plus gesture recognition. Gesture patterns are recognized by using artificial neural networks (ANNs) specifically adapted to the process of controlling an industrial robot. Since in continuous gesture recognition the communicative gestures appear intermittently with the noncommunicative, we are proposing a new architecture with two ANNs in series to recognize both kinds of gesture. A data glove is used as interface technology. Experimental results demonstrated that the proposed solution presents high recognition rates (over 99% for a library of ten gestures and over 96% for a library of thirty gestures), low training and learning time and a good capacity to generalize from particular situations.