 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGravity-aligned Rotation Averaging with Circular Regression
Oct 16, 2024
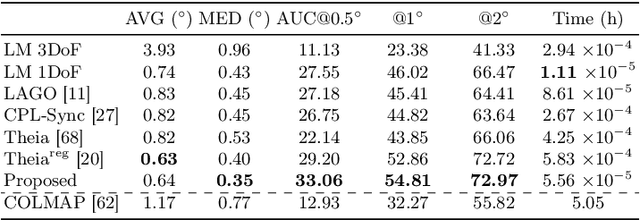

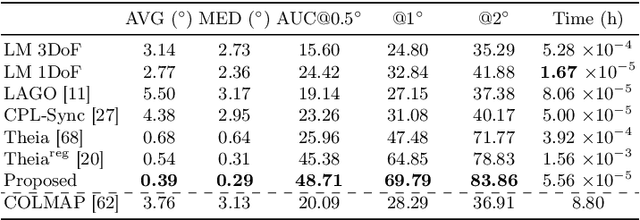
Reconstructing a 3D scene from unordered images is pivotal in computer vision and robotics, with applications spanning crowd-sourced mapping and beyond. While global Structure-from-Motion (SfM) techniques are scalable and fast, they often compromise on accuracy. To address this, we introduce a principled approach that integrates gravity direction into the rotation averaging phase of global pipelines, enhancing camera orientation accuracy and reducing the degrees of freedom. This additional information is commonly available in recent consumer devices, such as smartphones, mixed-reality devices and drones, making the proposed method readily accessible. Rooted in circular regression, our algorithm has similar convergence guarantees as linear regression. It also supports scenarios where only a subset of cameras have known gravity. Additionally, we propose a mechanism to refine error-prone gravity. We achieve state-of-the-art accuracy on four large-scale datasets. Particularly, the proposed method improves upon the SfM baseline by 13 AUC@$1^\circ$ points, on average, while running eight times faster. It also outperforms the standard planar pose graph optimization technique by 23 AUC@$1^\circ$ points. The code is at https://github.com/colmap/glomap.
Global Structure-from-Motion Revisited
Jul 29, 2024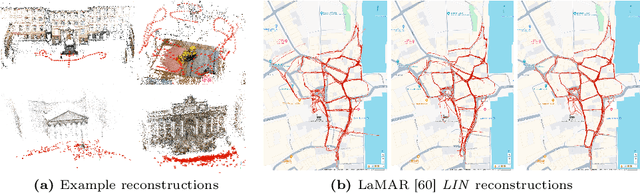
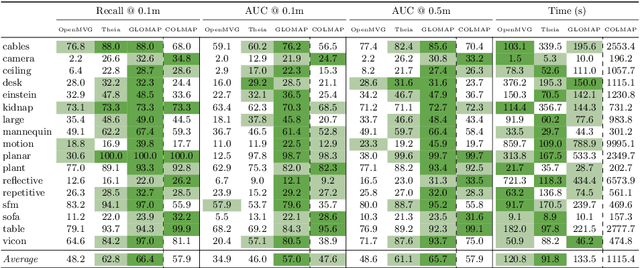
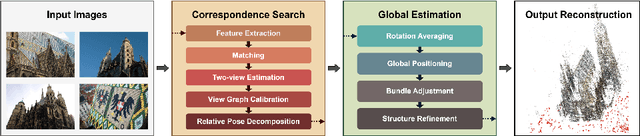

Recovering 3D structure and camera motion from images has been a long-standing focus of computer vision research and is known as Structure-from-Motion (SfM). Solutions to this problem are categorized into incremental and global approaches. Until now, the most popular systems follow the incremental paradigm due to its superior accuracy and robustness, while global approaches are drastically more scalable and efficient. With this work, we revisit the problem of global SfM and propose GLOMAP as a new general-purpose system that outperforms the state of the art in global SfM. In terms of accuracy and robustness, we achieve results on-par or superior to COLMAP, the most widely used incremental SfM, while being orders of magnitude faster. We share our system as an open-source implementation at {https://github.com/colmap/glomap}.