 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Memory for 3D Gaussian Splatting
Jun 24, 20253D Gaussian Splatting represents a breakthrough in the field of novel view synthesis. It establishes Gaussians as core rendering primitives for highly accurate real-world environment reconstruction. Recent advances have drastically increased the size of scenes that can be created. In this work, we present a method for rendering large and complex 3D Gaussian Splatting scenes using virtual memory. By leveraging well-established virtual memory and virtual texturing techniques, our approach efficiently identifies visible Gaussians and dynamically streams them to the GPU just in time for real-time rendering. Selecting only the necessary Gaussians for both storage and rendering results in reduced memory usage and effectively accelerates rendering, especially for highly complex scenes. Furthermore, we demonstrate how level of detail can be integrated into our proposed method to further enhance rendering speed for large-scale scenes. With an optimized implementation, we highlight key practical considerations and thoroughly evaluate the proposed technique and its impact on desktop and mobile devices.
Global 6DOF Pose Estimation from Untextured 2D City Models
Mar 18, 2015

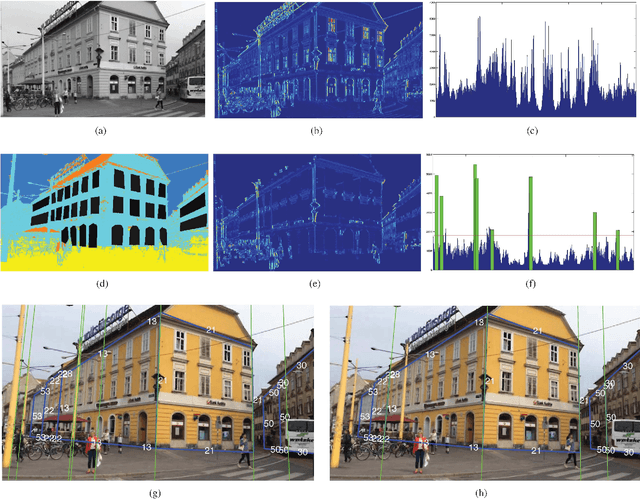

We propose a method for estimating the 3D pose for the camera of a mobile device in outdoor conditions, using only an untextured 2D model. Previous methods compute only a relative pose using a SLAM algorithm, or require many registered images, which are cumbersome to acquire. By contrast, our method returns an accurate, absolute camera pose in an absolute referential using simple 2D+height maps, which are broadly available, to refine a first estimate of the pose provided by the device's sensors. We show how to first estimate the camera absolute orientation from straight line segments, and then how to estimate the translation by aligning the 2D map with a semantic segmentation of the input image. We demonstrate the robustness and accuracy of our approach on a challenging dataset.