 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAIBA: An AI Model for Behavior Arbitration in Autonomous Driving
Sep 20, 2019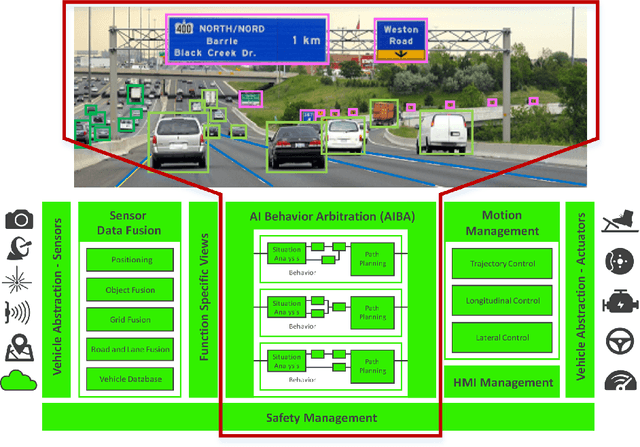
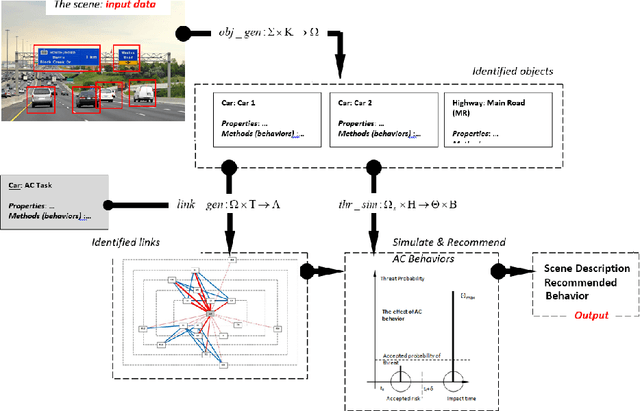
Driving in dynamically changing traffic is a highly challenging task for autonomous vehicles, especially in crowded urban roadways. The Artificial Intelligence (AI) system of a driverless car must be able to arbitrate between different driving strategies in order to properly plan the car's path, based on an understandable traffic scene model. In this paper, an AI behavior arbitration algorithm for Autonomous Driving (AD) is proposed. The method, coined AIBA (AI Behavior Arbitration), has been developed in two stages: (i) human driving scene description and understanding and (ii) formal modelling. The description of the scene is achieved by mimicking a human cognition model, while the modelling part is based on a formal representation which approximates the human driver understanding process. The advantage of the formal representation is that the functional safety of the system can be analytically inferred. The performance of the algorithm has been evaluated in Virtual Test Drive (VTD), a comprehensive traffic simulator, and in GridSim, a vehicle kinematics engine for prototypes.
* 12 pages