 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Miniature Biological Eagle-Eye Vision System for Small Target Detection
Jul 18, 2021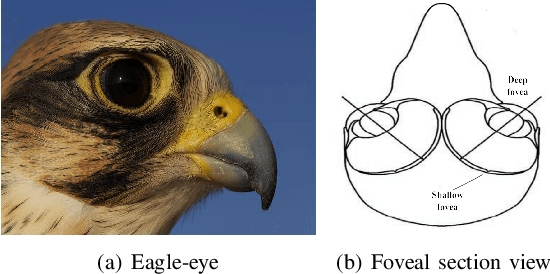
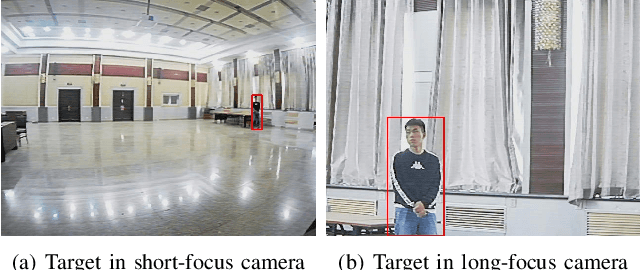
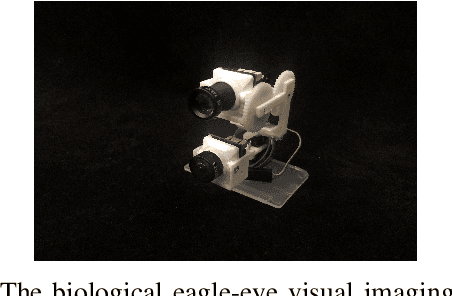

Small target detection is known to be a challenging problem. Inspired by the structural characteristics and physiological mechanism of eagle-eye, a miniature vision system is designed for small target detection in this paper. First, a hardware platform is established, which consists of a pan-tilt, a short-focus camera and a long-focus camera. Then, based on the visual attention mechanism of eagle-eye, the cameras with different focal lengths are controlled cooperatively to achieve small target detection. Experimental results show that the designed biological eagle-eye vision system can accurately detect small targets, which has a strong adaptive ability.
Vision-Based Target Localization for a Flapping-Wing Aerial Vehicle
Jul 15, 2021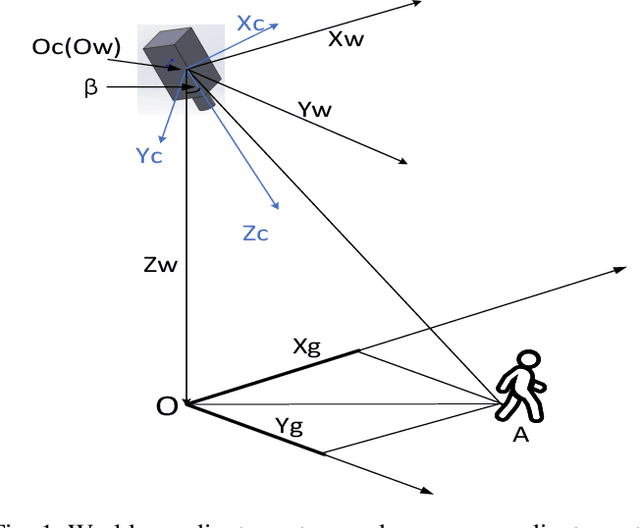
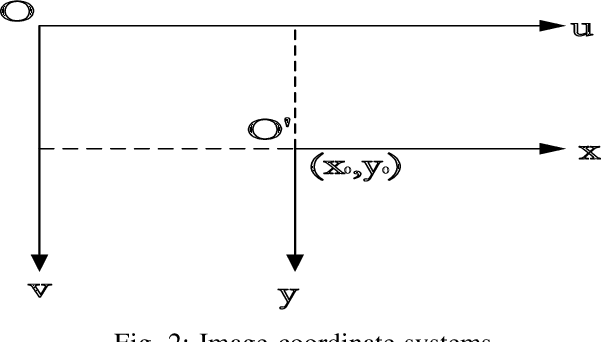
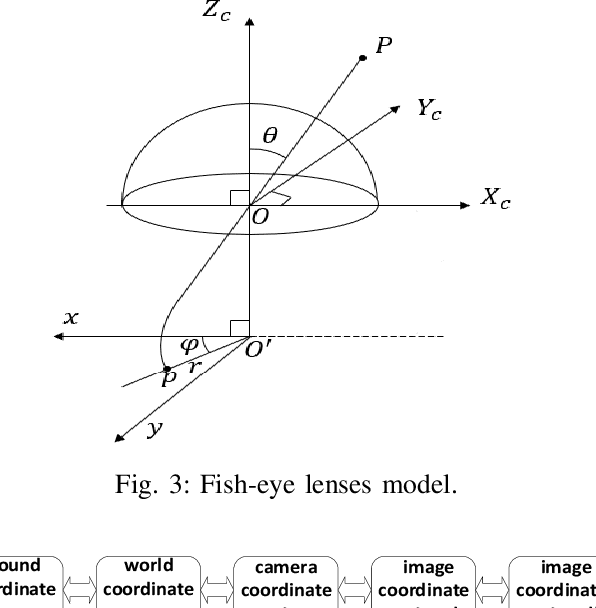
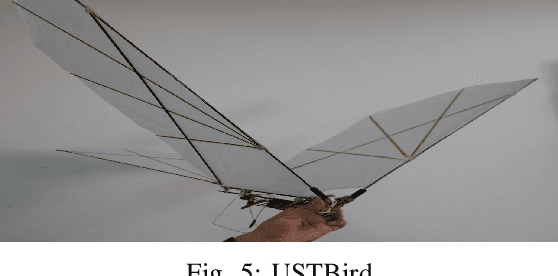
The flapping-wing aerial vehicle (FWAV) is a new type of flying robot that mimics the flight mode of birds and insects. However, FWAVs have their special characteristics of less load capacity and short endurance time, so that most existing systems of ground target localization are not suitable for them. In this paper, a vision-based target localization algorithm is proposed for FWAVs based on a generic camera model. Since sensors exist measurement error and the camera exists jitter and motion blur during flight, Gaussian noises are introduced in the simulation experiment, and then a first-order low-pass filter is used to stabilize the localization values. Moreover, in order to verify the feasibility and accuracy of the target localization algorithm, we design a set of simulation experiments where various noises are added. From the simulation results, it is found that the target localization algorithm has a good performance.