 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCFEVER: A Chinese Fact Extraction and VERification Dataset
Feb 20, 2024We present CFEVER, a Chinese dataset designed for Fact Extraction and VERification. CFEVER comprises 30,012 manually created claims based on content in Chinese Wikipedia. Each claim in CFEVER is labeled as "Supports", "Refutes", or "Not Enough Info" to depict its degree of factualness. Similar to the FEVER dataset, claims in the "Supports" and "Refutes" categories are also annotated with corresponding evidence sentences sourced from single or multiple pages in Chinese Wikipedia. Our labeled dataset holds a Fleiss' kappa value of 0.7934 for five-way inter-annotator agreement. In addition, through the experiments with the state-of-the-art approaches developed on the FEVER dataset and a simple baseline for CFEVER, we demonstrate that our dataset is a new rigorous benchmark for factual extraction and verification, which can be further used for developing automated systems to alleviate human fact-checking efforts. CFEVER is available at https://ikmlab.github.io/CFEVER.
Team NCTU: Toward AI-Driving for Autonomous Surface Vehicles -- From Duckietown to RobotX
Oct 31, 2019

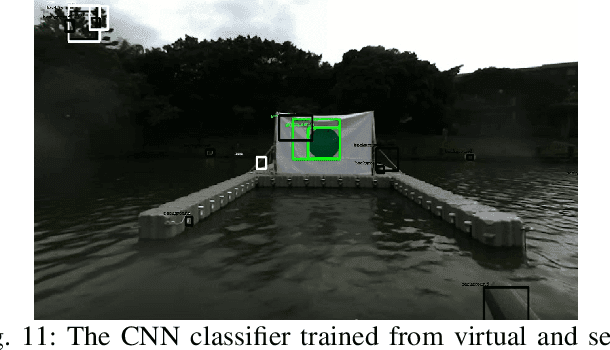

Robotic software and hardware systems of autonomous surface vehicles have been developed in transportation, military, and ocean researches for decades. Previous efforts in RobotX Challenges 2014 and 2016 facilitates the developments for important tasks such as obstacle avoidance and docking. Team NCTU is motivated by the AI Driving Olympics (AI-DO) developed by the Duckietown community, and adopts the principles to RobotX challenge. With the containerization (Docker) and uniformed AI agent (with observations and actions), we could better 1) integrate solutions developed in different middlewares (ROS and MOOS), 2) develop essential functionalities of from simulation (Gazebo) to real robots (either miniaturized or full-sized WAM-V), and 3) compare different approaches either from classic model-based or learning-based. Finally, we setup an outdoor on-surface platform with localization services for evaluation. Some of the preliminary results will be presented for the Team NCTU participations of the RobotX competition in Hawaii in 2018.