 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarmRL: Building the Future of Smart Active Systems
Apr 25, 2024
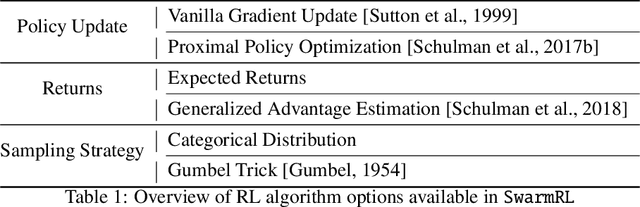


This work introduces SwarmRL, a Python package designed to study intelligent active particles. SwarmRL provides an easy-to-use interface for developing models to control microscopic colloids using classical control and deep reinforcement learning approaches. These models may be deployed in simulations or real-world environments under a common framework. We explain the structure of the software and its key features and demonstrate how it can be used to accelerate research. With SwarmRL, we aim to streamline research into micro-robotic control while bridging the gap between experimental and simulation-driven sciences. SwarmRL is available open-source on GitHub at https://github.com/SwarmRL/SwarmRL.
Emergence of Chemotactic Strategies with Multi-Agent Reinforcement Learning
Apr 02, 2024



Reinforcement learning (RL) is a flexible and efficient method for programming micro-robots in complex environments. Here we investigate whether reinforcement learning can provide insights into biological systems when trained to perform chemotaxis. Namely, whether we can learn about how intelligent agents process given information in order to swim towards a target. We run simulations covering a range of agent shapes, sizes, and swim speeds to determine if the physical constraints on biological swimmers, namely Brownian motion, lead to regions where reinforcement learners' training fails. We find that the RL agents can perform chemotaxis as soon as it is physically possible and, in some cases, even before the active swimming overpowers the stochastic environment. We study the efficiency of the emergent policy and identify convergence in agent size and swim speeds. Finally, we study the strategy adopted by the reinforcement learning algorithm to explain how the agents perform their tasks. To this end, we identify three emerging dominant strategies and several rare approaches taken. These strategies, whilst producing almost identical trajectories in simulation, are distinct and give insight into the possible mechanisms behind which biological agents explore their environment and respond to changing conditions.
Environmental effects on emergent strategy in micro-scale multi-agent reinforcement learning
Jul 03, 2023



Multi-Agent Reinforcement Learning (MARL) is a promising candidate for realizing efficient control of microscopic particles, of which micro-robots are a subset. However, the microscopic particles' environment presents unique challenges, such as Brownian motion at sufficiently small length-scales. In this work, we explore the role of temperature in the emergence and efficacy of strategies in MARL systems using particle-based Langevin molecular dynamics simulations as a realistic representation of micro-scale environments. To this end, we perform experiments on two different multi-agent tasks in microscopic environments at different temperatures, detecting the source of a concentration gradient and rotation of a rod. We find that at higher temperatures, the RL agents identify new strategies for achieving these tasks, highlighting the importance of understanding this regime and providing insight into optimal training strategies for bridging the generalization gap between simulation and reality. We also introduce a novel Python package for studying microscopic agents using reinforcement learning (RL) to accompany our results.