 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Forces of Driver Distraction: Explainable Predictions for the Visual Demand of In-Vehicle Touchscreen Interactions
Jan 05, 2023



With modern infotainment systems, drivers are increasingly tempted to engage in secondary tasks while driving. Since distracted driving is already one of the main causes of fatal accidents, in-vehicle touchscreen Human-Machine Interfaces (HMIs) must be as little distracting as possible. To ensure that these systems are safe to use, they undergo elaborate and expensive empirical testing, requiring fully functional prototypes. Thus, early-stage methods informing designers about the implication their design may have on driver distraction are of great value. This paper presents a machine learning method that, based on anticipated usage scenarios, predicts the visual demand of in-vehicle touchscreen interactions and provides local and global explanations of the factors influencing drivers' visual attention allocation. The approach is based on large-scale natural driving data continuously collected from production line vehicles and employs the SHapley Additive exPlanation (SHAP) method to provide explanations leveraging informed design decisions. Our approach is more accurate than related work and identifies interactions during which long glances occur with 68 % accuracy and predicts the total glance duration with a mean error of 2.4 s. Our explanations replicate the results of various recent studies and provide fast and easily accessible insights into the effect of UI elements, driving automation, and vehicle speed on driver distraction. The system can not only help designers to evaluate current designs but also help them to better anticipate and understand the implications their design decisions might have on future designs.
Destination Prediction Based on Partial Trajectory Data
Apr 16, 2020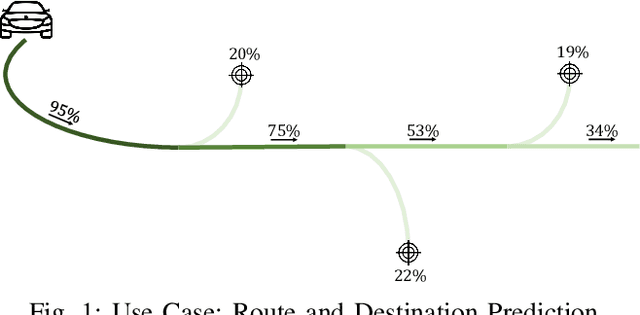
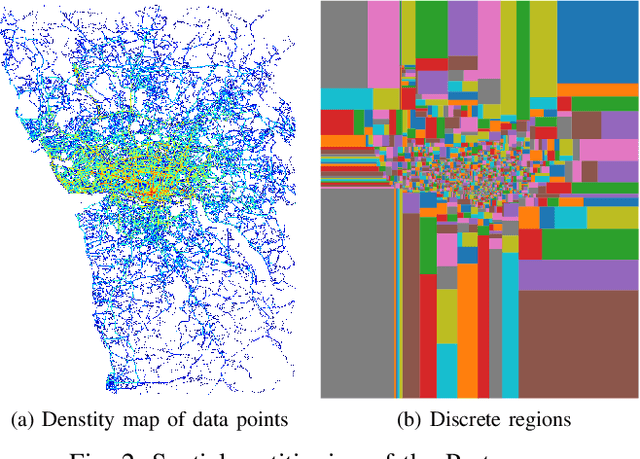
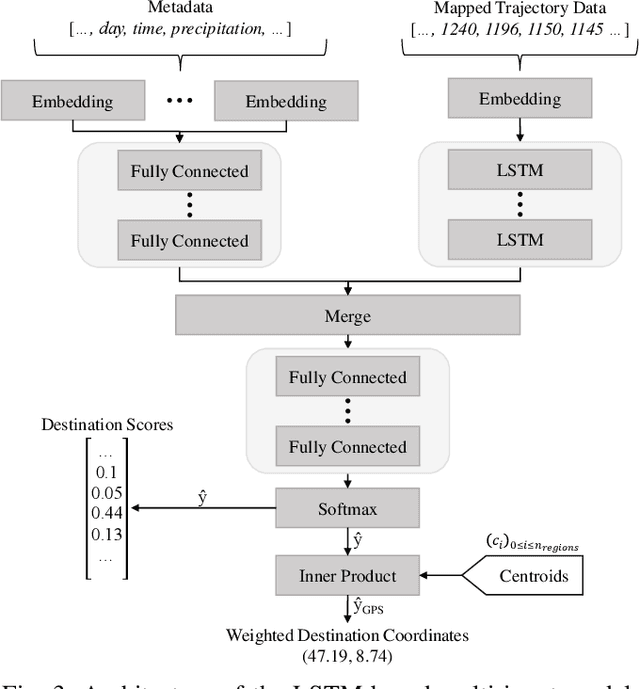
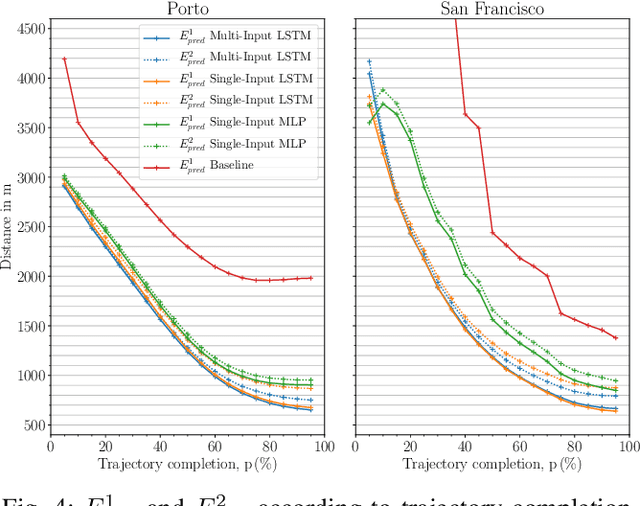
Two-thirds of the people who buy a new car prefer to use a substitute instead of the built-in navigation system. However, for many applications, knowledge about a user's intended destination and route is crucial. For example, suggestions for available parking spots close to the destination can be made or ride-sharing opportunities along the route are facilitated. Our approach predicts probable destinations and routes of a vehicle, based on the most recent partial trajectory and additional contextual data. The approach follows a three-step procedure: First, a $k$-d tree-based space discretization is performed, mapping GPS locations to discrete regions. Secondly, a recurrent neural network is trained to predict the destination based on partial sequences of trajectories. The neural network produces destination scores, signifying the probability of each region being the destination. Finally, the routes to the most probable destinations are calculated. To evaluate the method, we compare multiple neural architectures and present the experimental results of the destination prediction. The experiments are based on two public datasets of non-personalized, timestamped GPS locations of taxi trips. The best performing models were able to predict the destination of a vehicle with a mean error of 1.3 km and 1.43 km respectively.