 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDestination Prediction Based on Partial Trajectory Data
Paper and Code
Apr 16, 2020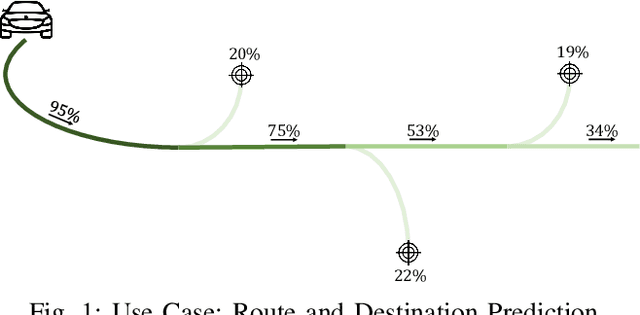
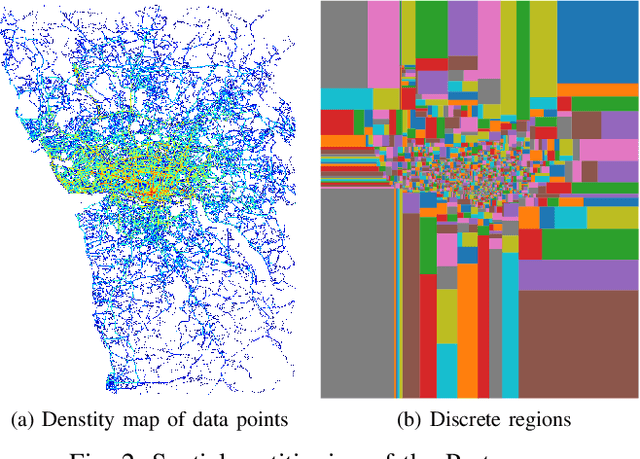
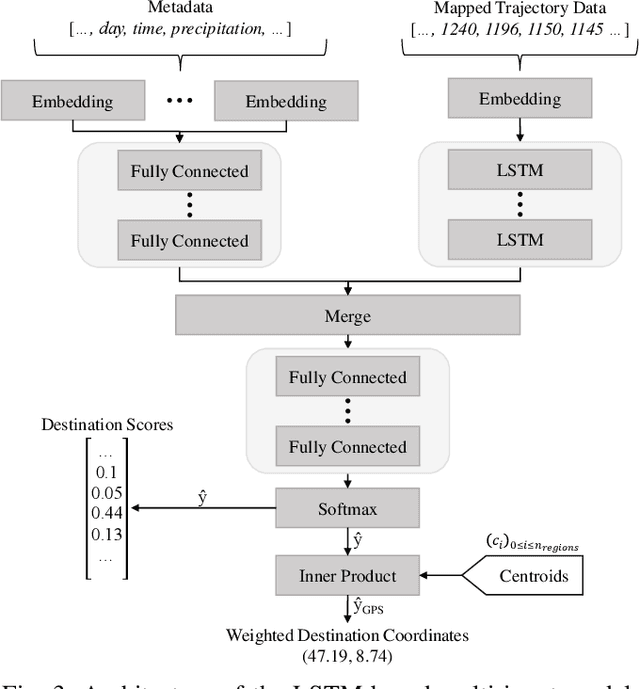
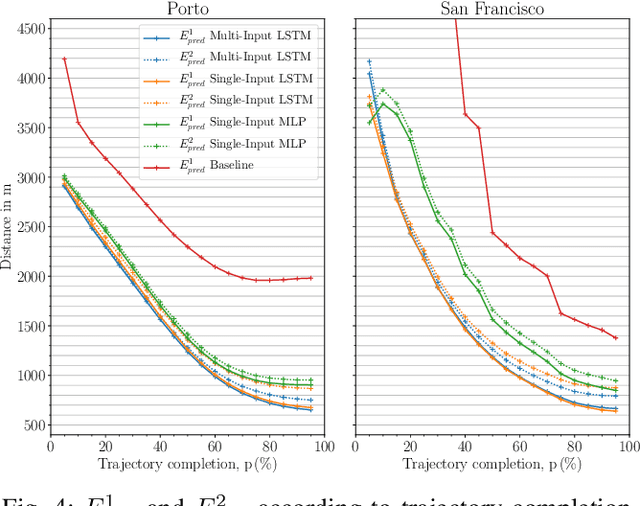
Two-thirds of the people who buy a new car prefer to use a substitute instead of the built-in navigation system. However, for many applications, knowledge about a user's intended destination and route is crucial. For example, suggestions for available parking spots close to the destination can be made or ride-sharing opportunities along the route are facilitated. Our approach predicts probable destinations and routes of a vehicle, based on the most recent partial trajectory and additional contextual data. The approach follows a three-step procedure: First, a $k$-d tree-based space discretization is performed, mapping GPS locations to discrete regions. Secondly, a recurrent neural network is trained to predict the destination based on partial sequences of trajectories. The neural network produces destination scores, signifying the probability of each region being the destination. Finally, the routes to the most probable destinations are calculated. To evaluate the method, we compare multiple neural architectures and present the experimental results of the destination prediction. The experiments are based on two public datasets of non-personalized, timestamped GPS locations of taxi trips. The best performing models were able to predict the destination of a vehicle with a mean error of 1.3 km and 1.43 km respectively.