 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResidual Neural Networks for the Prediction of Planetary Collision Outcomes
Oct 09, 2022Fast and accurate treatment of collisions in the context of modern N-body planet formation simulations remains a challenging task due to inherently complex collision processes. We aim to tackle this problem with machine learning (ML), in particular via residual neural networks. Our model is motivated by the underlying physical processes of the data-generating process and allows for flexible prediction of post-collision states. We demonstrate that our model outperforms commonly used collision handling methods such as perfect inelastic merging and feed-forward neural networks in both prediction accuracy and out-of-distribution generalization. Our model outperforms the current state of the art in 20/24 experiments. We provide a dataset that consists of 10164 Smooth Particle Hydrodynamics (SPH) simulations of pairwise planetary collisions. The dataset is specifically suited for ML research to improve computational aspects for collision treatment and for studying planetary collisions in general. We formulate the ML task as a multi-task regression problem, allowing simple, yet efficient training of ML models for collision treatment in an end-to-end manner. Our models can be easily integrated into existing N-body frameworks and can be used within our chosen parameter space of initial conditions, i.e. where similar-sized collisions during late-stage terrestrial planet formation typically occur.
Decision-making for automated vehicles using a hierarchical behavior-based arbitration scheme
Mar 02, 2020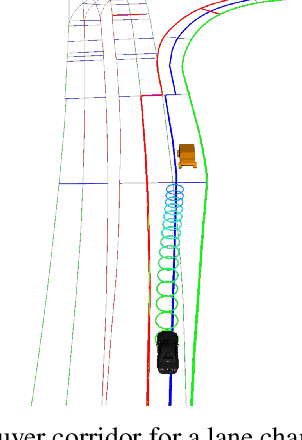
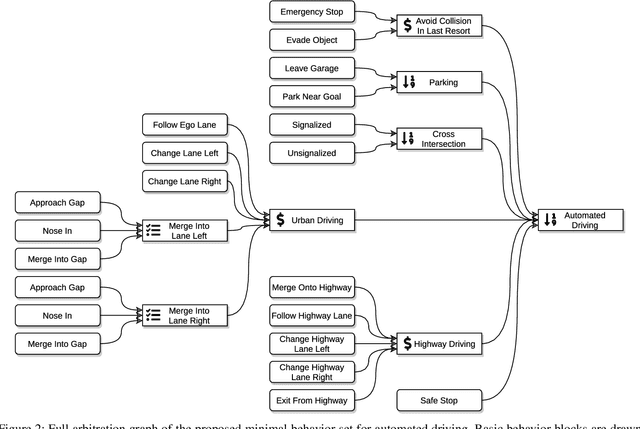
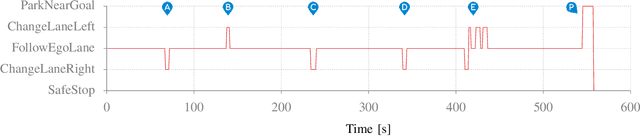
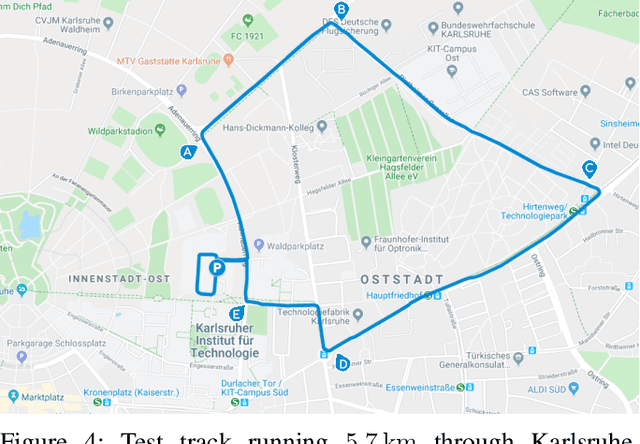
Behavior planning and decision-making are some of the biggest challenges for highly automated systems. A fully automated vehicle is confronted with numerous tactical and strategical choices. Most state-of-the-art automated vehicle platforms implement tactical and strategical behavior generation using finite state machines. However, these usually result in poor explainability, maintainability and scalability. Research in robotics has raised many architectures to mitigate these problems, most interestingly behavior-based systems and hybrid derivatives. Inspired by these approaches, we propose a hierarchical behavior-based architecture for tactical and strategical behavior generation in automated driving. It is a generalizing and scalable decision-making framework, utilizing modular behavior components to compose more complex behaviors in a bottom-up approach. The system is capable of combining a variety of scenario- and methodology-specific solutions, like POMDPs, RRT* or learning-based behavior, into one understandable and traceable architecture. We extend the hierarchical behavior-based arbitration concept to address scenarios where multiple behavior options are applicable but have no clear priority against each other. Then, we formulate the behavior generation stack for automated driving in urban and highway environments, incorporating parking and emergency behaviors as well. Finally, we illustrate our design in an explanatory evaluation.