 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuilding with Drones: Accurate 3D Facade Reconstruction using MAVs
Feb 25, 2015
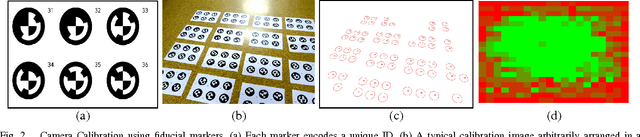
Automatic reconstruction of 3D models from images using multi-view Structure-from-Motion methods has been one of the most fruitful outcomes of computer vision. These advances combined with the growing popularity of Micro Aerial Vehicles as an autonomous imaging platform, have made 3D vision tools ubiquitous for large number of Architecture, Engineering and Construction applications among audiences, mostly unskilled in computer vision. However, to obtain high-resolution and accurate reconstructions from a large-scale object using SfM, there are many critical constraints on the quality of image data, which often become sources of inaccuracy as the current 3D reconstruction pipelines do not facilitate the users to determine the fidelity of input data during the image acquisition. In this paper, we present and advocate a closed-loop interactive approach that performs incremental reconstruction in real-time and gives users an online feedback about the quality parameters like Ground Sampling Distance (GSD), image redundancy, etc on a surface mesh. We also propose a novel multi-scale camera network design to prevent scene drift caused by incremental map building, and release the first multi-scale image sequence dataset as a benchmark. Further, we evaluate our system on real outdoor scenes, and show that our interactive pipeline combined with a multi-scale camera network approach provides compelling accuracy in multi-view reconstruction tasks when compared against the state-of-the-art methods.
Geometric Abstraction from Noisy Image-Based 3D Reconstructions
Apr 19, 2014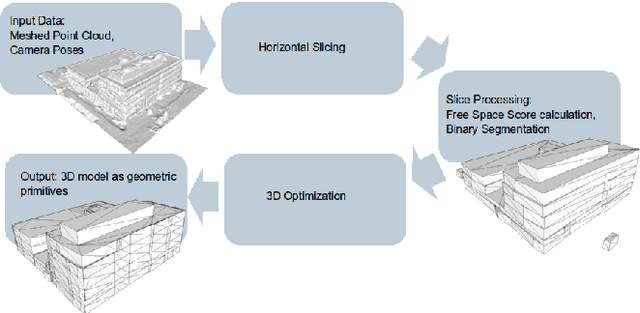

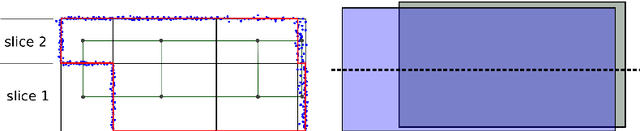
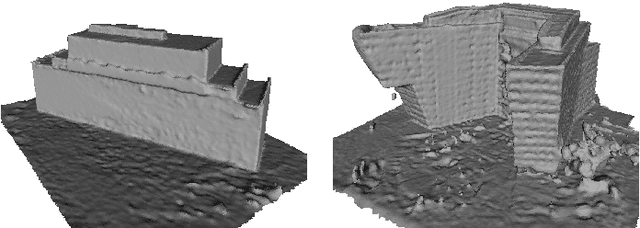
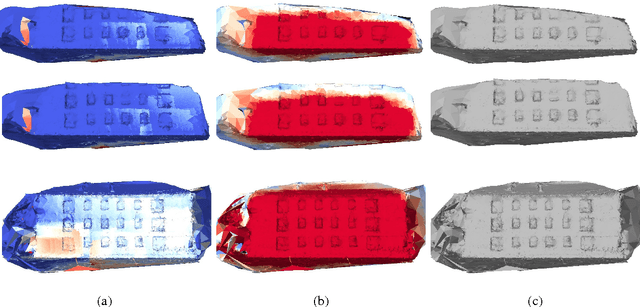
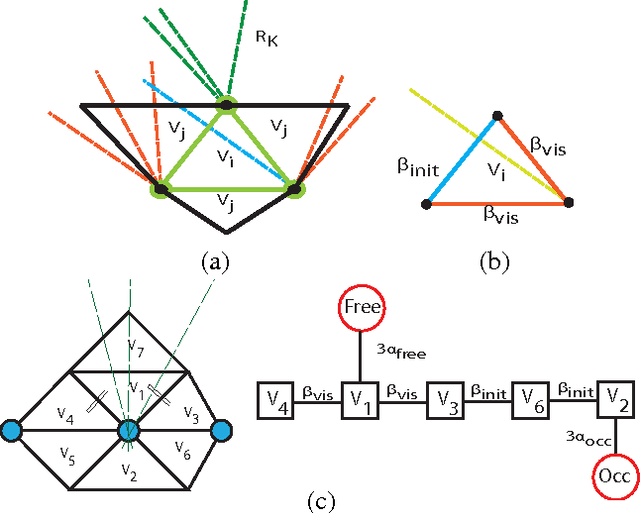
Creating geometric abstracted models from image-based scene reconstructions is difficult due to noise and irregularities in the reconstructed model. In this paper, we present a geometric modeling method for noisy reconstructions dominated by planar horizontal and orthogonal vertical structures. We partition the scene into horizontal slices and create an inside/outside labeling represented by a floor plan for each slice by solving an energy minimization problem. Consecutively, we create an irregular discretization of the volume according to the individual floor plans and again label each cell as inside/outside by minimizing an energy function. By adjusting the smoothness parameter, we introduce different levels of detail. In our experiments, we show results with varying regularization levels using synthetically generated and real-world data.