 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and validation of zero-slack separable manipulator for Intracardiac Echocardiography
Apr 01, 2022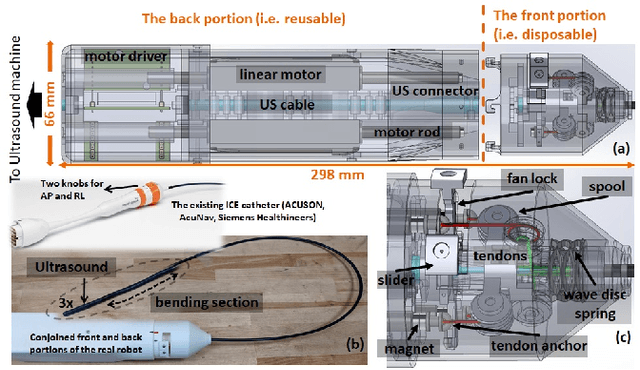
Clinicians require substantial training and experience to become comfortable with steering Intracardiac echocardiography (ICE) catheter to localize and measure the area of treatment to watch for complications while device catheters are deployed in another access. Thus, it is reasonable that a robotic-assist system to hold and actively manipulate the ICE catheter could ease the workload of the physician. Existing commercially-available robotic systems and research prototypes all use existing commercially available ICE catheters based on multiple tendon-sheath mechanism (TSM). To motorize the existing TSM-based ICE catheter, the actuators interface with the outer handle knobs to manipulate four internal tendons. However, in practice, the actuators are located at a sterile, safe place far away from the ICE handle. Thus, to interface with knobs, there exist multiple coupled gear structures between two, leading to a highly nonlinear behavior (e.g. various slack, elasticity) alongside hysteresis phenomena in TSM. Since ICE catheters are designed for single use, the expensive actuators need to be located in a safe place so as to be reusable. Moreover, these actuators should interface as directly as possible with the tendons for accurate tip controls. In this paper, we introduce a separable ICE catheter robot with four tendon actuation: one part reusable and another disposable. Moreover, we propose a practical model and calibration method for our proposed mechanism so that four tendons are actuated simultaneously allowing for precise tip control and mitigating issues with conventional devices such as dead-zone and hysteresis with simple linear compensation. We consider an open-loop controller since many available ICE catheters are used without position-tracking sensors at the tip due to costs and single use