 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots that Sync and Swarm: A Proof of Concept in ROS 2
Apr 08, 2019


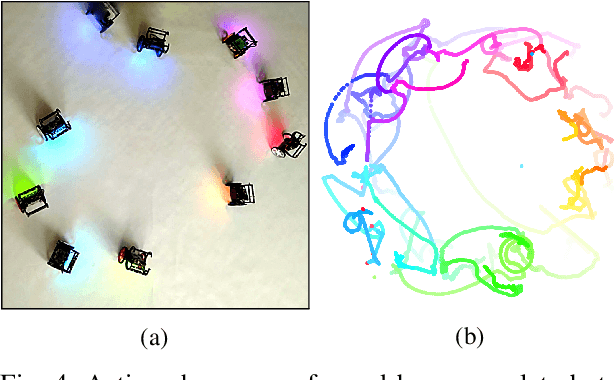
A unified mathematical model for synchronisation and swarming has been proposed recently. Each system entity, called "swarmalator", coordinates its internal phase and location with the other entities in a way that these two attributes are mutually coupled. This paper realises and studies, for the first time, the concept of swarmalators in technical systems. We adapt and extend the original model for its use on mobile robots and implement it in the Robot Operating System 2 (ROS 2). Simulations and experiments with small robots demonstrate the feasibility of the model and show its potential to be applied in real-world systems. All types of space-time patterns achieved in theory can be reproduced in practice. Applications can be found in monitoring, exploration, entertainment and art, among other domains.
Interference Prediction in Wireless Networks: Stochastic Geometry meets Recursive Filtering
Mar 26, 2019



This article proposes and evaluates a technique to predict the level of interference in wireless networks. We design a recursive predictor that computes future interference values at a given location by filtering measured interference at this location. The parametrization of the predictor is done offline by translating the autocorrelation of interference into an autoregressive moving average (ARMA) representation. This ARMA model is inserted into a steady-state Kalman filter enabling nodes to predict with low computational effort. Results show good performance in terms of accuracy between predicted and true values for relevant time horizons. Although the predictor is parametrized for the case of Poisson networks, Rayleigh fading, and fixed message lengths, a sensitivity analysis shows that it also works well in more general network scenarios. Numerical examples for underlay device-to-device communications and a common wireless sensor technology illustrate its broad applicability. The predictor can be applied as part of interference management to improve medium access, scheduling, and resource allocation.
Cellular-Connected UAVs over 5G: Deep Reinforcement Learning for Interference Management
Jan 16, 2018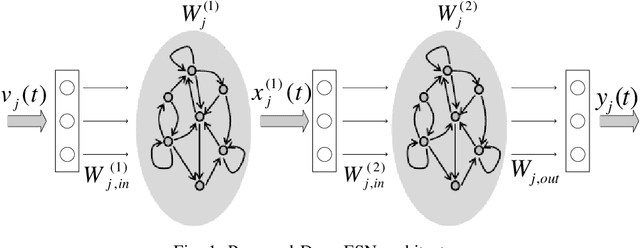
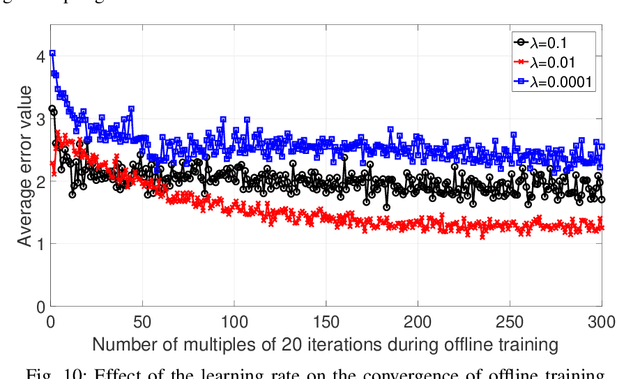
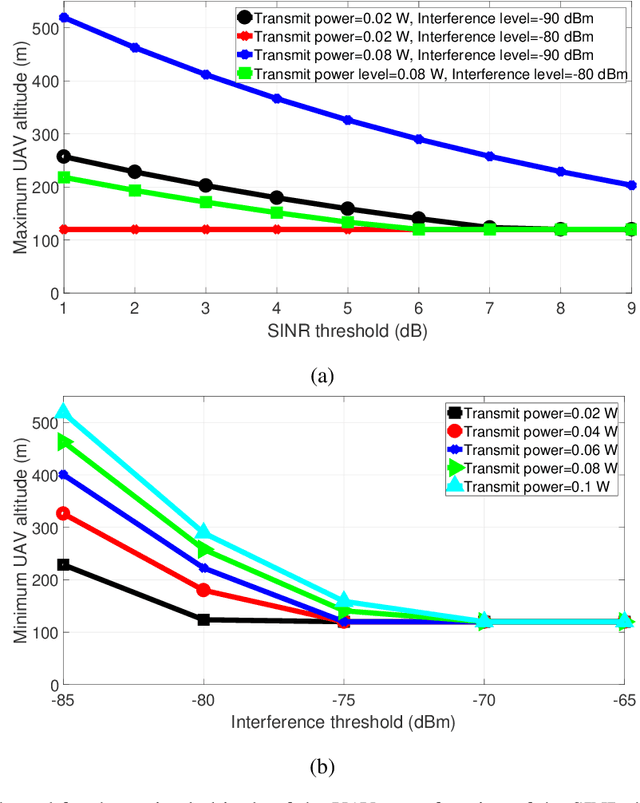
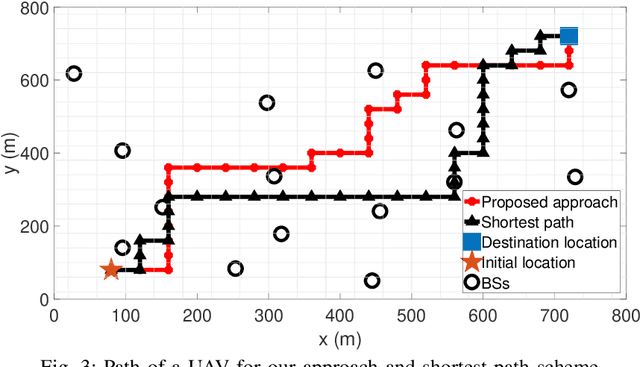
In this paper, an interference-aware path planning scheme for a network of cellular-connected unmanned aerial vehicles (UAVs) is proposed. In particular, each UAV aims at achieving a tradeoff between maximizing energy efficiency and minimizing both wireless latency and the interference level caused on the ground network along its path. The problem is cast as a dynamic game among UAVs. To solve this game, a deep reinforcement learning algorithm, based on echo state network (ESN) cells, is proposed. The introduced deep ESN architecture is trained to allow each UAV to map each observation of the network state to an action, with the goal of minimizing a sequence of time-dependent utility functions. Each UAV uses ESN to learn its optimal path, transmission power level, and cell association vector at different locations along its path. The proposed algorithm is shown to reach a subgame perfect Nash equilibrium (SPNE) upon convergence. Moreover, an upper and lower bound for the altitude of the UAVs is derived thus reducing the computational complexity of the proposed algorithm. Simulation results show that the proposed scheme achieves better wireless latency per UAV and rate per ground user (UE) while requiring a number of steps that is comparable to a heuristic baseline that considers moving via the shortest distance towards the corresponding destinations. The results also show that the optimal altitude of the UAVs varies based on the ground network density and the UE data rate requirements and plays a vital role in minimizing the interference level on the ground UEs as well as the wireless transmission delay of the UAV.
Job Selection in a Network of Autonomous UAVs for Delivery of Goods
May 26, 2017



This article analyzes two classes of job selection policies that control how a network of autonomous aerial vehicles delivers goods from depots to customers. Customer requests (jobs) occur according to a spatio-temporal stochastic process not known by the system. If job selection uses a policy in which the first job (FJ) is served first, the system may collapse to instability by removing just one vehicle. Policies that serve the nearest job (NJ) first show such threshold behavior only in some settings and can be implemented in a distributed manner. The timing of job selection has significant impact on delivery time and stability for NJ while it has no impact for FJ. Based on these findings we introduce a methodological approach for decision-making support to set up and operate such a system, taking into account the trade-off between monetary cost and service quality. In particular, we compute a lower bound for the infrastructure expenditure required to achieve a certain expected delivery time. The approach includes three time horizons: long-term decisions on the number of depots to deploy in the service area, mid-term decisions on the number of vehicles to use, and short-term decisions on the policy to operate the vehicles.