 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots that Sync and Swarm: A Proof of Concept in ROS 2
Apr 08, 2019


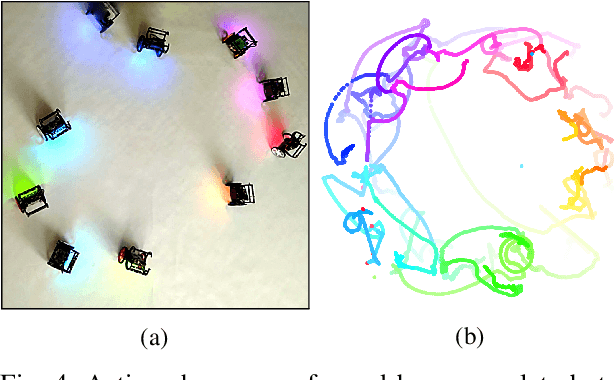
A unified mathematical model for synchronisation and swarming has been proposed recently. Each system entity, called "swarmalator", coordinates its internal phase and location with the other entities in a way that these two attributes are mutually coupled. This paper realises and studies, for the first time, the concept of swarmalators in technical systems. We adapt and extend the original model for its use on mobile robots and implement it in the Robot Operating System 2 (ROS 2). Simulations and experiments with small robots demonstrate the feasibility of the model and show its potential to be applied in real-world systems. All types of space-time patterns achieved in theory can be reproduced in practice. Applications can be found in monitoring, exploration, entertainment and art, among other domains.