 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCovy: An AI-powered Robot for Detection of Breaches in Social Distancing
Jul 14, 2022
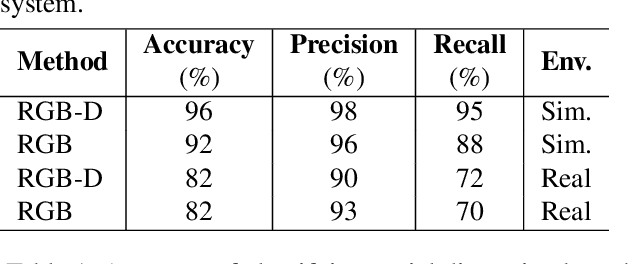
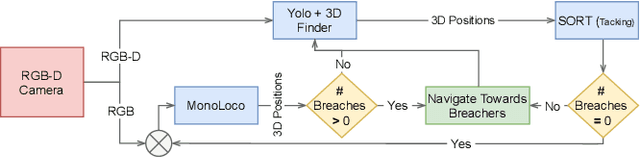
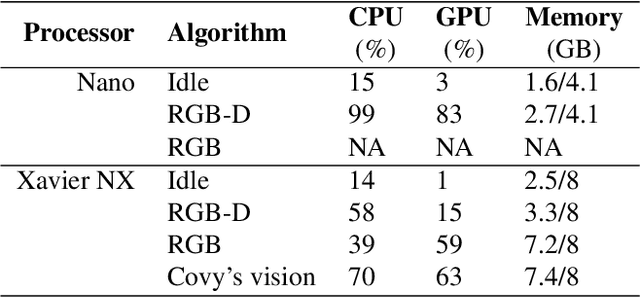
We present Covy -- a robotic platform that promotes social distancing during pandemics like COVID-19. Covy features a novel compound vision system that enables it to detect social distancing breaches up to 16m away. Covy navigates its surroundings autonomously using a hybrid navigation stack that combines Deep Reinforcement Learning (DRL)and a probabilistic localization method. We built the complete system and evaluated Covy's performance through extensive sets of experiments both in simulated and realistic environments. Amongst others, our results show that the hybrid navigation stack is more robust compared to a pure DRL-based solution.
Deep Reinforcement Learning Versus Evolution Strategies: A Comparative Survey
Sep 28, 2021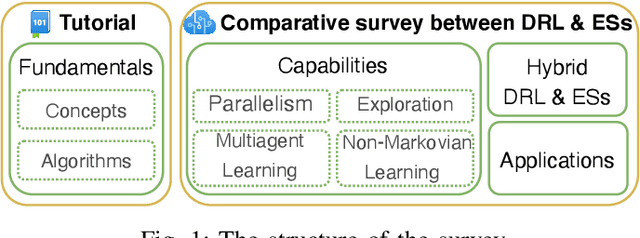
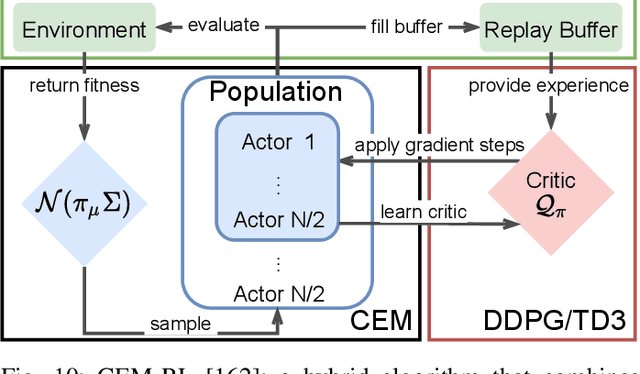
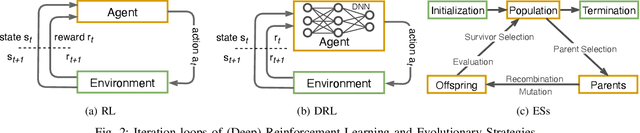
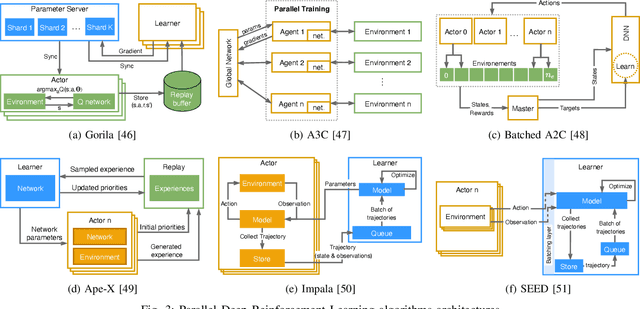
Deep Reinforcement Learning (DRL) and Evolution Strategies (ESs) have surpassed human-level control in many sequential decision-making problems, yet many open challenges still exist. To get insights into the strengths and weaknesses of DRL versus ESs, an analysis of their respective capabilities and limitations is provided. After presenting their fundamental concepts and algorithms, a comparison is provided on key aspects such as scalability, exploration, adaptation to dynamic environments, and multi-agent learning. Then, the benefits of hybrid algorithms that combine concepts from DRL and ESs are highlighted. Finally, to have an indication about how they compare in real-world applications, a survey of the literature for the set of applications they support is provided.