 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Flight Demonstration of a Quadrotor for Urban Mapping and Target Tracking Research
Feb 20, 2024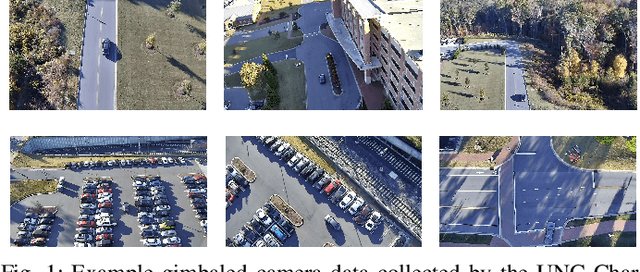
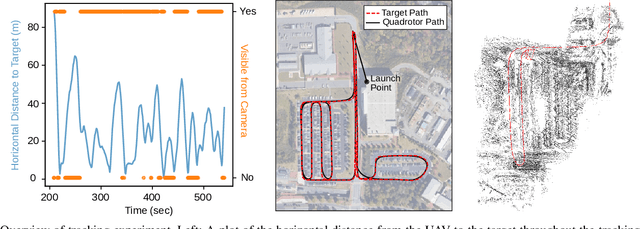
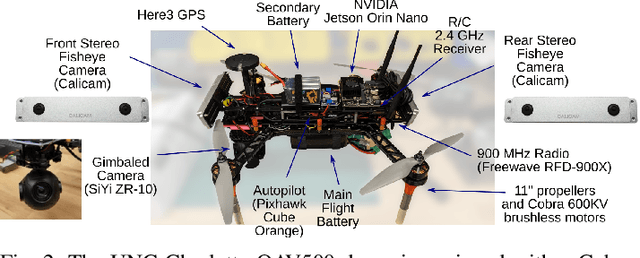
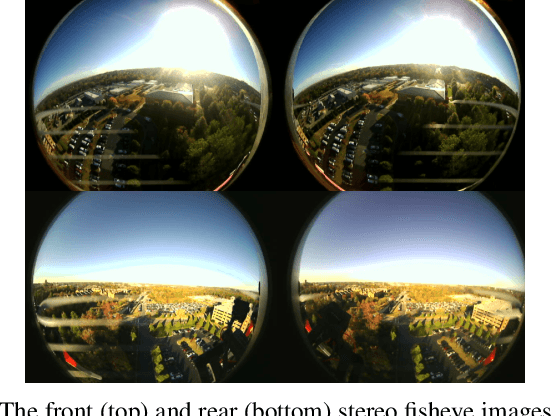
This paper describes the hardware design and flight demonstration of a small quadrotor with imaging sensors for urban mapping, hazard avoidance, and target tracking research. The vehicle is equipped with five cameras, including two pairs of fisheye stereo cameras that enable a nearly omnidirectional view and a two-axis gimbaled camera. An onboard NVIDIA Jetson Orin Nano computer running the Robot Operating System software is used for data collection. An autonomous tracking behavior was implemented to coordinate the motion of the quadrotor and gimbaled camera to track a moving GPS coordinate. The data collection system was demonstrated through a flight test that tracked a moving GPS-tagged vehicle through a series of roads and parking lots. A map of the environment was reconstructed from the collected images using the Direct Sparse Odometry (DSO) algorithm. The performance of the quadrotor was also characterized by acoustic noise, communication range, battery voltage in hover, and maximum speed tests.
Cesium Tiles for High-realism Simulation and Comparing SLAM Results in Corresponding Virtual and Real-world Environments
Jan 15, 2024This article discusses the use of a simulated environment to predict algorithm results in the real world. Simulators are crucial in allowing researchers to test algorithms, sensor integration, and navigation systems without deploying expensive hardware. This article examines how the AirSim simulator, Unreal Engine, and Cesium plugin can be used to generate simulated digital twin models of real-world locations. Several technical challenges in completing the analysis are discussed and the technical solutions are detailed in this article. Work investigates how to assess mapping results for a real-life experiment using Cesium Tiles provided by digital twins of the experimental location. This is accompanied by a description of a process for duplicating real-world flights in simulation. The performance of these methods is evaluated by analyzing real-life and experimental image telemetry with the Direct Sparse Odometry (DSO) mapping algorithm. Results indicate that Cesium Tiles environments can provide highly accurate models of ground truth geometry after careful alignment. Further, results from real-life and simulated telemetry analysis indicate that the virtual simulation results accurately predict real-life results. Findings indicate that the algorithm results in real life and in the simulated duplicate exhibited a high degree of similarity. This indicates that the use of Cesium Tiles environments as a virtual digital twin for real-life experiments will provide representative results for such algorithms. The impact of this can be significant, potentially allowing expansive virtual testing of robotic systems at specific deployment locations to develop solutions that are tailored to the environment and potentially outperforming solutions meant to work in completely generic environments.