 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNemotron 3 Super: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Apr 14, 2026We describe the pre-training, post-training, and quantization of Nemotron 3 Super, a 120 billion (active 12 billion) parameter hybrid Mamba-Attention Mixture-of-Experts model. Nemotron 3 Super is the first model in the Nemotron 3 family to 1) be pre-trained in NVFP4, 2) leverage LatentMoE, a new Mixture-of-Experts architecture that optimizes for both accuracy per FLOP and accuracy per parameter, and 3) include MTP layers for inference acceleration through native speculative decoding. We pre-trained Nemotron 3 Super on 25 trillion tokens followed by post-training using supervised fine tuning (SFT) and reinforcement learning (RL). The final model supports up to 1M context length and achieves comparable accuracy on common benchmarks, while also achieving up to 2.2x and 7.5x higher inference throughput compared to GPT-OSS-120B and Qwen3.5-122B, respectively. Nemotron 3 Super datasets, along with the base, post-trained, and quantized checkpoints, are open-sourced on HuggingFace.
NVIDIA Nemotron 3: Efficient and Open Intelligence
Dec 24, 2025We introduce the Nemotron 3 family of models - Nano, Super, and Ultra. These models deliver strong agentic, reasoning, and conversational capabilities. The Nemotron 3 family uses a Mixture-of-Experts hybrid Mamba-Transformer architecture to provide best-in-class throughput and context lengths of up to 1M tokens. Super and Ultra models are trained with NVFP4 and incorporate LatentMoE, a novel approach that improves model quality. The two larger models also include MTP layers for faster text generation. All Nemotron 3 models are post-trained using multi-environment reinforcement learning enabling reasoning, multi-step tool use, and support granular reasoning budget control. Nano, the smallest model, outperforms comparable models in accuracy while remaining extremely cost-efficient for inference. Super is optimized for collaborative agents and high-volume workloads such as IT ticket automation. Ultra, the largest model, provides state-of-the-art accuracy and reasoning performance. Nano is released together with its technical report and this white paper, while Super and Ultra will follow in the coming months. We will openly release the model weights, pre- and post-training software, recipes, and all data for which we hold redistribution rights.
Nemotron 3 Nano: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Dec 23, 2025We present Nemotron 3 Nano 30B-A3B, a Mixture-of-Experts hybrid Mamba-Transformer language model. Nemotron 3 Nano was pretrained on 25 trillion text tokens, including more than 3 trillion new unique tokens over Nemotron 2, followed by supervised fine tuning and large-scale RL on diverse environments. Nemotron 3 Nano achieves better accuracy than our previous generation Nemotron 2 Nano while activating less than half of the parameters per forward pass. It achieves up to 3.3x higher inference throughput than similarly-sized open models like GPT-OSS-20B and Qwen3-30B-A3B-Thinking-2507, while also being more accurate on popular benchmarks. Nemotron 3 Nano demonstrates enhanced agentic, reasoning, and chat abilities and supports context lengths up to 1M tokens. We release both our pretrained Nemotron 3 Nano 30B-A3B Base and post-trained Nemotron 3 Nano 30B-A3B checkpoints on Hugging Face.
NVIDIA Nemotron Nano 2: An Accurate and Efficient Hybrid Mamba-Transformer Reasoning Model
Aug 21, 2025



We introduce Nemotron-Nano-9B-v2, a hybrid Mamba-Transformer language model designed to increase throughput for reasoning workloads while achieving state-of-the-art accuracy compared to similarly-sized models. Nemotron-Nano-9B-v2 builds on the Nemotron-H architecture, in which the majority of the self-attention layers in the common Transformer architecture are replaced with Mamba-2 layers, to achieve improved inference speed when generating the long thinking traces needed for reasoning. We create Nemotron-Nano-9B-v2 by first pre-training a 12-billion-parameter model (Nemotron-Nano-12B-v2-Base) on 20 trillion tokens using an FP8 training recipe. After aligning Nemotron-Nano-12B-v2-Base, we employ the Minitron strategy to compress and distill the model with the goal of enabling inference on up to 128k tokens on a single NVIDIA A10G GPU (22GiB of memory, bfloat16 precision). Compared to existing similarly-sized models (e.g., Qwen3-8B), we show that Nemotron-Nano-9B-v2 achieves on-par or better accuracy on reasoning benchmarks while achieving up to 6x higher inference throughput in reasoning settings like 8k input and 16k output tokens. We are releasing Nemotron-Nano-9B-v2, Nemotron-Nano12B-v2-Base, and Nemotron-Nano-9B-v2-Base checkpoints along with the majority of our pre- and post-training datasets on Hugging Face.
AIDPS:Adaptive Intrusion Detection and Prevention System for Underwater Acoustic Sensor Networks
Sep 14, 2023



Underwater Acoustic Sensor Networks (UW-ASNs) are predominantly used for underwater environments and find applications in many areas. However, a lack of security considerations, the unstable and challenging nature of the underwater environment, and the resource-constrained nature of the sensor nodes used for UW-ASNs (which makes them incapable of adopting security primitives) make the UW-ASN prone to vulnerabilities. This paper proposes an Adaptive decentralised Intrusion Detection and Prevention System called AIDPS for UW-ASNs. The proposed AIDPS can improve the security of the UW-ASNs so that they can efficiently detect underwater-related attacks (e.g., blackhole, grayhole and flooding attacks). To determine the most effective configuration of the proposed construction, we conduct a number of experiments using several state-of-the-art machine learning algorithms (e.g., Adaptive Random Forest (ARF), light gradient-boosting machine, and K-nearest neighbours) and concept drift detection algorithms (e.g., ADWIN, kdqTree, and Page-Hinkley). Our experimental results show that incremental ARF using ADWIN provides optimal performance when implemented with One-class support vector machine (SVM) anomaly-based detectors. Furthermore, our extensive evaluation results also show that the proposed scheme outperforms state-of-the-art bench-marking methods while providing a wider range of desirable features such as scalability and complexity.
Customer Empowered Privacy-Preserving Secure Verification using Decentralized Identifier and Verifiable Credentials For Product Delivery Using Robots
Aug 12, 2022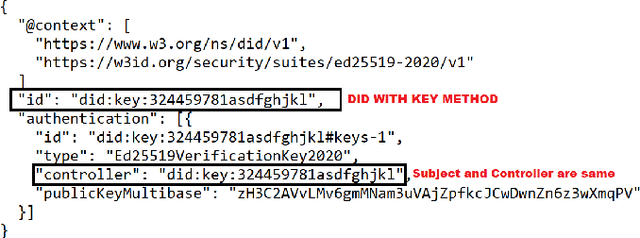



In the age of respiratory illnesses like COVID 19, we understand the necessity for a robot based delivery system to ensure safe and contact free courier delivery. A blockchain based Dynamic IDentifier gives people total power over their identities while preserving auditability and anonymity. A human mobile phone and a robot are machines created with a chip, making it simple to deploy a physical unclonable function based verification system between the robot and the customer. This article presents a novel framework and a first customer verification scheme for verified courier delivery utilizing the blockchain enabled DID and PUF enabled robots. We employ DID for customer authentication between a robot (a service provider) and a customer and PUF for robot verification by the customer. We ve also put the proposed work into practice and demonstrated its capabilities in terms of throughput, latency, computing cost, and communication cost. We also show formal security proof for the proposed user verification scheme based on the tamarin prover.