 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Surrogate Potential Mean Field Games via Gaussian Processes: A Data-Driven Approach to Ill-Posed Inverse Problems
Feb 17, 2025



Mean field games (MFGs) describe the collective behavior of large populations of interacting agents. In this work, we tackle ill-posed inverse problems in potential MFGs, aiming to recover the agents' population, momentum, and environmental setup from limited, noisy measurements and partial observations. These problems are ill-posed because multiple MFG configurations can explain the same data, or different parameters can yield nearly identical observations. Nonetheless, they remain crucial in practice for real-world scenarios where data are inherently sparse or noisy, or where the MFG structure is not fully determined. Our focus is on finding surrogate MFGs that accurately reproduce the observed data despite these challenges. We propose two Gaussian process (GP)-based frameworks: an inf-sup formulation and a bilevel approach. The choice between them depends on whether the unknown parameters introduce concavity in the objective. In the inf-sup framework, we use the linearity of GPs and their parameterization structure to maintain convex-concave properties, allowing us to apply standard convex optimization algorithms. In the bilevel framework, we employ a gradient-descent-based algorithm and introduce two methods for computing the outer gradient. The first method leverages an existing solver for the inner potential MFG and applies automatic differentiation, while the second adopts an adjoint-based strategy that computes the outer gradient independently of the inner solver. Our numerical experiments show that when sufficient prior information is available, the unknown parameters can be accurately recovered. Otherwise, if prior information is limited, the inverse problem is ill-posed, but our frameworks can still produce surrogate MFG models that closely match observed data.
Convergence analysis of controlled particle systems arising in deep learning: from finite to infinite sample size
Apr 08, 2024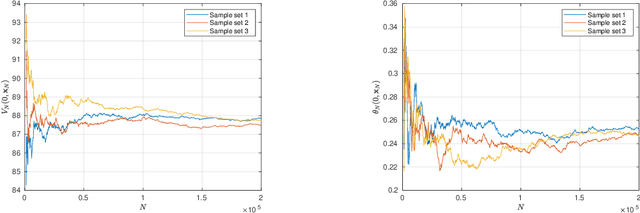
This paper deals with a class of neural SDEs and studies the limiting behavior of the associated sampled optimal control problems as the sample size grows to infinity. The neural SDEs with N samples can be linked to the N-particle systems with centralized control. We analyze the Hamilton--Jacobi--Bellman equation corresponding to the N-particle system and establish regularity results which are uniform in N. The uniform regularity estimates are obtained by the stochastic maximum principle and the analysis of a backward stochastic Riccati equation. Using these uniform regularity results, we show the convergence of the minima of objective functionals and optimal parameters of the neural SDEs as the sample size N tends to infinity. The limiting objects can be identified with suitable functions defined on the Wasserstein space of Borel probability measures. Furthermore, quantitative algebraic convergence rates are also obtained.
Decoding Mean Field Games from Population and Environment Observations By Gaussian Processes
Dec 24, 2023



This paper presents a Gaussian Process (GP) framework, a non-parametric technique widely acknowledged for regression and classification tasks, to address inverse problems in mean field games (MFGs). By leveraging GPs, we aim to recover agents' strategic actions and the environment's configurations from partial and noisy observations of the population of agents and the setup of the environment. Our method is a probabilistic tool to infer the behaviors of agents in MFGs from data in scenarios where the comprehensive dataset is either inaccessible or contaminated by noises.