 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHTP: Exploiting Holistic Temporal Patterns for Sequential Recommendation
Jul 22, 2023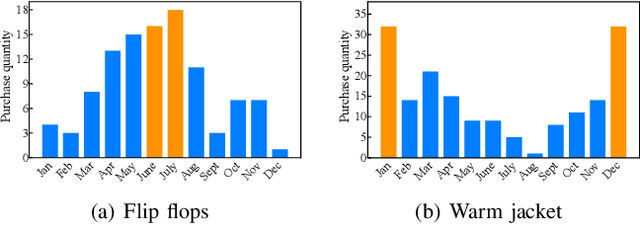
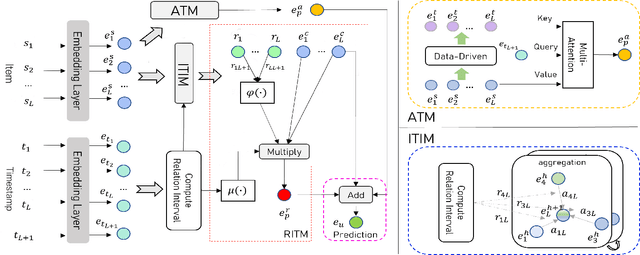

Sequential recommender systems have demonstrated a huge success for next-item recommendation by explicitly exploiting the temporal order of users' historical interactions. In practice, user interactions contain more useful temporal information beyond order, as shown by some pioneering studies. In this paper, we systematically investigate various temporal information for sequential recommendation and identify three types of advantageous temporal patterns beyond order, including absolute time information, relative item time intervals and relative recommendation time intervals. We are the first to explore item-oriented absolute time patterns. While existing models consider only one or two of these three patterns, we propose a novel holistic temporal pattern based neural network, named HTP, to fully leverage all these three patterns. In particular, we introduce novel components to address the subtle correlations between relative item time intervals and relative recommendation time intervals, which render a major technical challenge. Extensive experiments on three real-world benchmark datasets show that our HTP model consistently and substantially outperforms many state-of-the-art models. Our code is publically available at https://github.com/623851394/HTP/tree/main/HTP-main
A Comprehensive Approach for UAV Small Object Detection with Simulation-based Transfer Learning and Adaptive Fusion
Sep 04, 2021


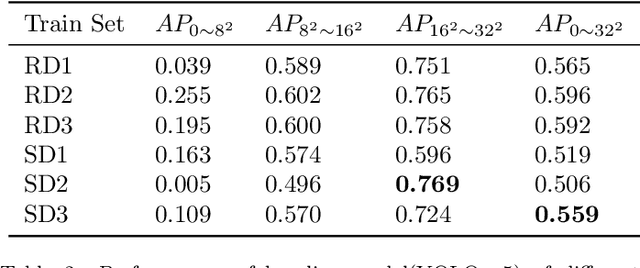
Precisely detection of Unmanned Aerial Vehicles(UAVs) plays a critical role in UAV defense systems. Deep learning is widely adopted for UAV object detection whereas researches on this topic are limited by the amount of dataset and small scale of UAV. To tackle these problems, a novel comprehensive approach that combines transfer learning based on simulation data and adaptive fusion is proposed. Firstly, the open-source plugin AirSim proposed by Microsoft is used to generate mass realistic simulation data. Secondly, transfer learning is applied to obtain a pre-trained YOLOv5 model on the simulated dataset and fine-tuned model on the real-world dataset. Finally, an adaptive fusion mechanism is proposed to further improve small object detection performance. Experiment results demonstrate the effectiveness of simulation-based transfer learning which leads to a 2.7% performance increase on UAV object detection. Furthermore, with transfer learning and adaptive fusion mechanism, 7.1% improvement is achieved compared to the original YOLO v5 model.