 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Time Continuous Space Homeostatic Reinforcement Learning (CTCS-HRRL) : Towards Biological Self-Autonomous Agent
Jan 17, 2024Homeostasis is a biological process by which living beings maintain their internal balance. Previous research suggests that homeostasis is a learned behaviour. Recently introduced Homeostatic Regulated Reinforcement Learning (HRRL) framework attempts to explain this learned homeostatic behavior by linking Drive Reduction Theory and Reinforcement Learning. This linkage has been proven in the discrete time-space, but not in the continuous time-space. In this work, we advance the HRRL framework to a continuous time-space environment and validate the CTCS-HRRL (Continuous Time Continuous Space HRRL) framework. We achieve this by designing a model that mimics the homeostatic mechanisms in a real-world biological agent. This model uses the Hamilton-Jacobian Bellman Equation, and function approximation based on neural networks and Reinforcement Learning. Through a simulation-based experiment we demonstrate the efficacy of this model and uncover the evidence linked to the agent's ability to dynamically choose policies that favor homeostasis in a continuously changing internal-state milieu. Results of our experiments demonstrate that agent learns homeostatic behaviour in a CTCS environment, making CTCS-HRRL a promising framework for modellng animal dynamics and decision-making.
Continuous Homeostatic Reinforcement Learning for Self-Regulated Autonomous Agents
Sep 14, 2021
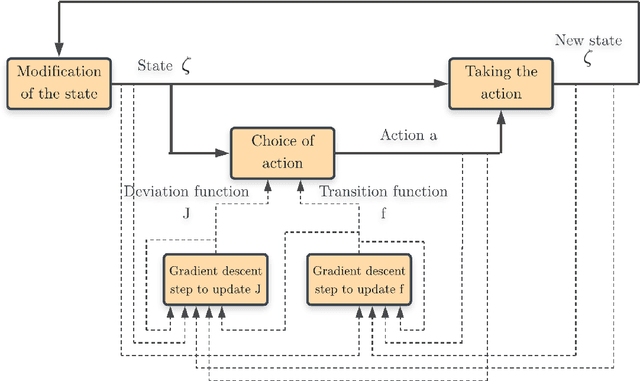
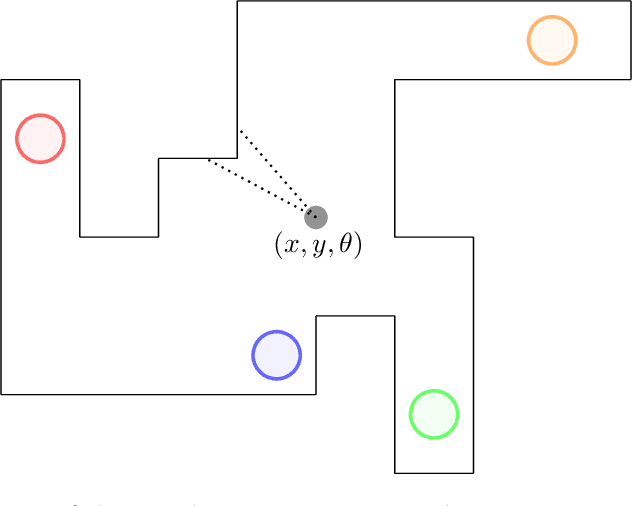

Homeostasis is a prevalent process by which living beings maintain their internal milieu around optimal levels. Multiple lines of evidence suggest that living beings learn to act to predicatively ensure homeostasis (allostasis). A classical theory for such regulation is drive reduction, where a function of the difference between the current and the optimal internal state. The recently introduced homeostatic regulated reinforcement learning theory (HRRL), by defining within the framework of reinforcement learning a reward function based on the internal state of the agent, makes the link between the theories of drive reduction and reinforcement learning. The HRRL makes it possible to explain multiple eating disorders. However, the lack of continuous change in the internal state of the agent with the discrete-time modeling has been so far a key shortcoming of the HRRL theory. Here, we propose an extension of the homeostatic reinforcement learning theory to a continuous environment in space and time, while maintaining the validity of the theoretical results and the behaviors explained by the model in discrete time. Inspired by the self-regulating mechanisms abundantly present in biology, we also introduce a model for the dynamics of the agent internal state, requiring the agent to continuously take actions to maintain homeostasis. Based on the Hamilton-Jacobi-Bellman equation and function approximation with neural networks, we derive a numerical scheme allowing the agent to learn directly how its internal mechanism works, and to choose appropriate action policies via reinforcement learning and an appropriate exploration of the environment. Our numerical experiments show that the agent does indeed learn to behave in a way that is beneficial to its survival in the environment, making our framework promising for modeling animal dynamics and decision-making.