 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeolocation estimation of target vehicles using image processing and geometric computation
Mar 08, 2022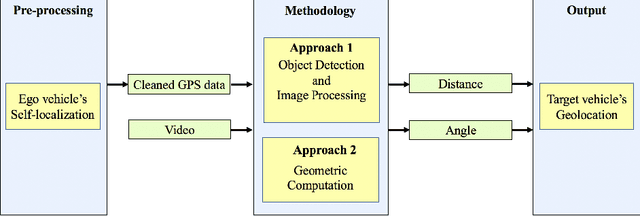
Estimating vehicles' locations is one of the key components in intelligent traffic management systems (ITMSs) for increasing traffic scene awareness. Traditionally, stationary sensors have been employed in this regard. The development of advanced sensing and communication technologies on modern vehicles (MVs) makes it feasible to use such vehicles as mobile sensors to estimate the traffic data of observed vehicles. This study aims to explore the capabilities of a monocular camera mounted on an MV in order to estimate the geolocation of the observed vehicle in a global positioning system (GPS) coordinate system. We proposed a new methodology by integrating deep learning, image processing, and geometric computation to address the observed-vehicle localization problem. To evaluate our proposed methodology, we developed new algorithms and tested them using real-world traffic data. The results indicated that our proposed methodology and algorithms could effectively estimate the observed vehicle's latitude and longitude dynamically.