 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient COLREGs-Compliant Collision Avoidance using Turning Circle-based Control Barrier Function
Apr 27, 2025This paper proposes a computationally efficient collision avoidance algorithm using turning circle-based control barrier functions (CBFs) that comply with international regulations for preventing collisions at sea (COLREGs). Conventional CBFs often lack explicit consideration of turning capabilities and avoidance direction, which are key elements in developing a COLREGs-compliant collision avoidance algorithm. To overcome these limitations, we introduce two CBFs derived from left and right turning circles. These functions establish safety conditions based on the proximity between the traffic ships and the centers of the turning circles, effectively determining both avoidance directions and turning capabilities. The proposed method formulates a quadratic programming problem with the CBFs as constraints, ensuring safe navigation without relying on computationally intensive trajectory optimization. This approach significantly reduces computational effort while maintaining performance comparable to model predictive control-based methods. Simulation results validate the effectiveness of the proposed algorithm in enabling COLREGs-compliant, safe navigation, demonstrating its potential for reliable and efficient operation in complex maritime environments.
Turning Circle-based Control Barrier Function for Efficient Collision Avoidance of Nonholonomic Vehicles
Mar 26, 2025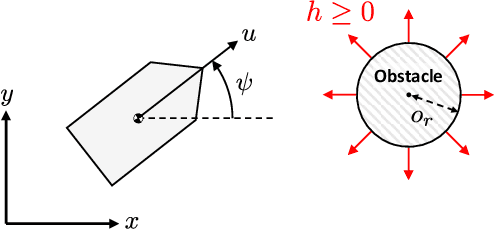



This paper presents a new control barrier function (CBF) designed to improve the efficiency of collision avoidance for nonholonomic vehicles. Traditional CBFs typically rely on the shortest Euclidean distance to obstacles, overlooking the limited heading change ability of nonholonomic vehicles. This often leads to abrupt maneuvers and excessive speed reductions, which is not desirable and reduces the efficiency of collision avoidance. Our approach addresses these limitations by incorporating the distance to the turning circle, considering the vehicle's limited maneuverability imposed by its nonholonomic constraints. The proposed CBF is integrated with model predictive control (MPC) to generate more efficient trajectories compared to existing methods that rely solely on Euclidean distance-based CBFs. The effectiveness of the proposed method is validated through numerical simulations on unicycle vehicles and experiments with underactuated surface vehicles.
Parameter-Varying Koopman Operator for Nonlinear System Modeling and Control
Sep 19, 2023This paper proposes a novel approach for modeling and controlling nonlinear systems with varying parameters. The approach introduces the use of a parameter-varying Koopman operator (PVKO) in a lifted space, which provides an efficient way to understand system behavior and design control algorithms that account for underlying dynamics and changing parameters. The PVKO builds on a conventional Koopman model by incorporating local time-invariant linear systems through interpolation within the lifted space. This paper outlines a procedure for identifying the PVKO and designing a model predictive control using the identified PVKO model. Simulation results demonstrate that the proposed approach improves model accuracy and enables predictions based on future parameter information. The feasibility and stability of the proposed control approach are analyzed, and their effectiveness is demonstrated through simulation.
Nonlinear Model Predictive Control with Obstacle Avoidance Constraints for Autonomous Navigation in a Canal Environment
Jul 19, 2023



In this paper, we describe the development process of autonomous navigation capabilities of a small cruise boat operating in a canal environment and present the results of a field experiment conducted in the Pohang Canal, South Korea. Nonlinear model predictive control (NMPC) was used for the online trajectory planning and tracking control of the cruise boat in a narrow passage in the canal. To consider the nonlinear characteristics of boat dynamics, system identification was performed using experimental data from various test maneuvers, such as acceleration-deceleration and zigzag trials. To efficiently represent the obstacle structures in the canal environment, we parameterized the canal walls as line segments with point cloud data, captured by an onboard LiDAR sensor, and considered them as constraints for obstacle avoidance. The proposed method was implemented in a single NMPC layer, and its real-world performance was verified through experimental runs in the Pohang Canal.
Pohang Canal Dataset: A Multimodal Maritime Dataset for Autonomous Navigation in Restricted Waters
Mar 09, 2023This paper presents a multimodal maritime dataset and the data collection procedure used to gather it, which aims to facilitate autonomous navigation in restricted water environments. The dataset comprises measurements obtained using various perception and navigation sensors, including a stereo camera, an infrared camera, an omnidirectional camera, three LiDARs, a marine radar, a global positioning system, and an attitude heading reference system. The data were collected along a 7.5-km-long route that includes a narrow canal, inner and outer ports, and near-coastal areas in Pohang, South Korea. The collection was conducted under diverse weather and visual conditions. The dataset and its detailed description are available for free download at https://sites.google.com/view/pohang-canal-dataset.