 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmart-Insertion-V: Photorealistic Video Insertion via a Closed-Loop Feedback Dual-Stream Framework
May 22, 2026Mask-free video object insertion has emerged as a challenging task, requiring harmonious integration of reference objects into source videos. However, existing methods struggle when references exhibit severe stylistic domain gaps with the source scene. To overcome this, we propose \textit{\textbf{Smart-Insertion-V}}, an end-to-end \textbf{Dual-Stream} framework that concurrently conducts video insertion and image style transfer. Within this framework, the image stream synchronously guides the video generation process, while a \textbf{Closed-loop Feedback} mechanism is further incorporated to ensure robust insertion. Inevitably, integrating these diverse conditioning signals results in feature entanglement and style leakage. To tackle this issue, we design \textbf{Dual-World-View RoPE} to distinguish different signals via spatial-temporal offsets without incurring heavy training overhead. Furthermore, to facilitate spatial grounding and stylistic adaptation, we introduce a \textbf{Decoupled Guidance Module} that leverages a Vision-Language Model for semantic reasoning while preserving original temporal guidance with native text encoder. To bridge data gap for harmonious reference insertion task, we propose a data curation pipeline and will release an \textbf{open-source dataset}. Experiments demonstrate that our method can insert objects into plausible positions while achieving the most harmonious results.
Garment suggestion based on comfort extracted from physiological and emotional parameters
Jul 09, 2024



The purpose of the study was to find the true comfort of the wearer by conceptualizing, formulating, and proving the relation between physiological and emotional parameters with clothing fit and fabric. A mixed-method research design was used, and the findings showed that physiological indicators such as heart rate are closely linked with user comfort. However, a significant change in emotional response indicated a definite relationship between different fabric and fit types. The research was conducted to discover the relation between true comfort parameters and clothing, which is unique to the field. The findings help us understand how fabric types and clothing fit types can affect physiological and emotional responses, providing the consumer with satisfactory clothing with the suitable properties needed.
A Study of Shared-Control with Force Feedback for Obstacle Avoidance in Whole-body Telelocomotion of a Wheeled Humanoid
Sep 12, 2022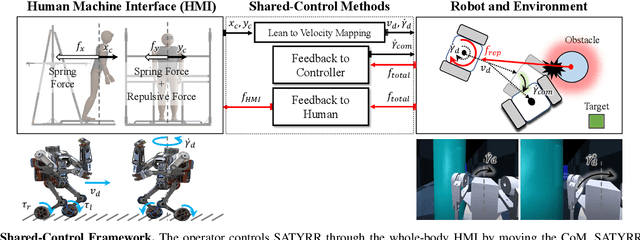
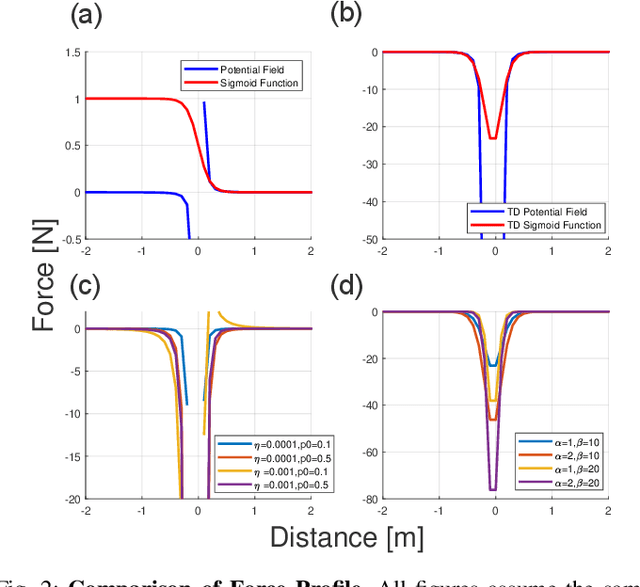
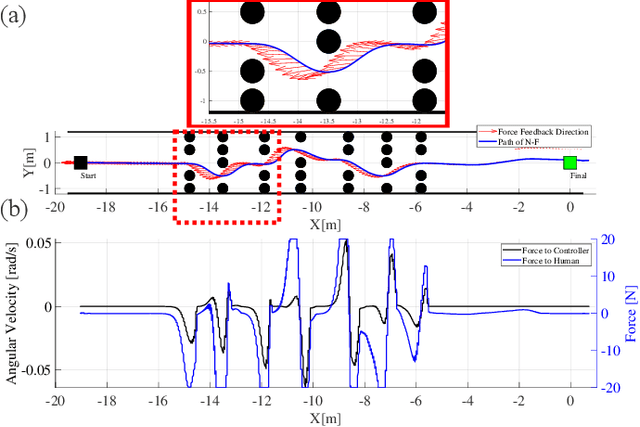
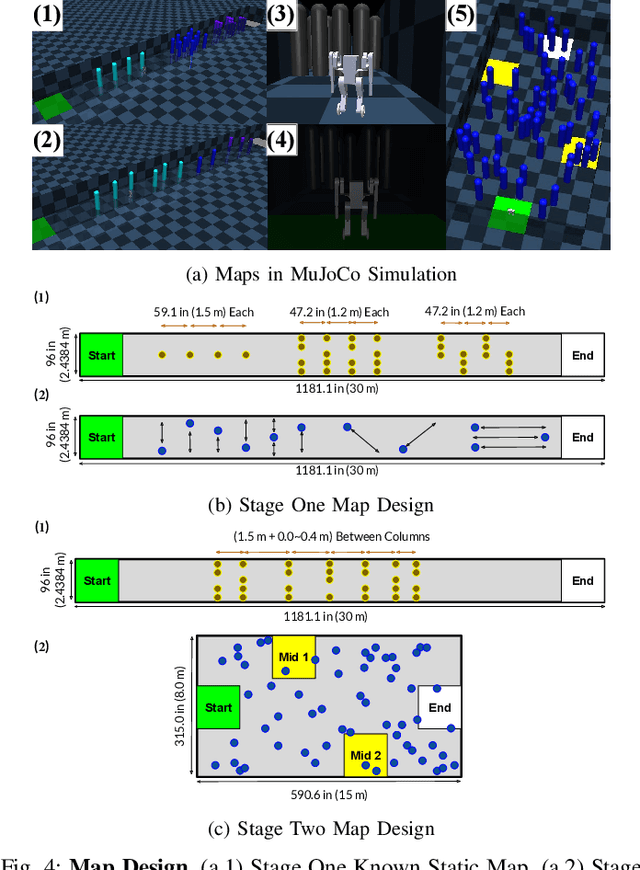
Teleoperation has emerged as an alternative solution to fully-autonomous systems for achieving human-level capabilities on humanoids. Specifically, teleoperation with whole-body control is a promising hands-free strategy to command humanoids but demands more physical and mental effort. To mitigate this limitation, researchers have proposed shared-control methods incorporating robot decision-making to aid humans on low-level tasks, further reducing operation effort. However, shared-control methods for wheeled humanoid telelocomotion on a whole-body level has yet to be explored. In this work, we study how whole-body feedback affects the performance of different shared-control methods for obstacle avoidance in diverse environments. A Time-Derivative Sigmoid Function (TDSF) is proposed to generate more intuitive force feedback from obstacles. Comprehensive human experiments were conducted, and the results concluded that force feedback enhances the whole-body telelocomotion performance in unfamiliar environments but could reduce performance in familiar environments. Conveying the robot's intention through haptics showed further improvements since the operator can utilize the force feedback for short-distance planning and visual feedback for long-distance planning.