 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Reference Model for IoT Embodied Agents Controlled by Neural Networks
Feb 15, 2021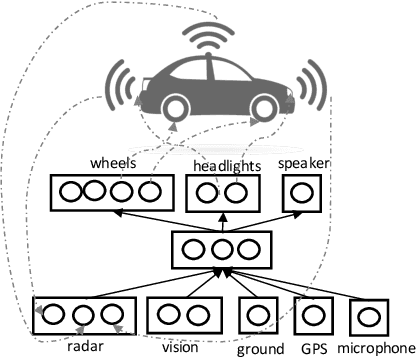
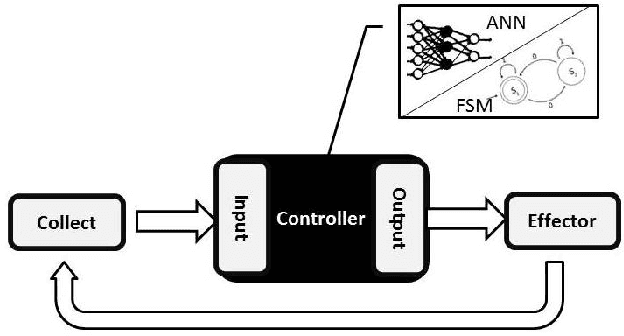
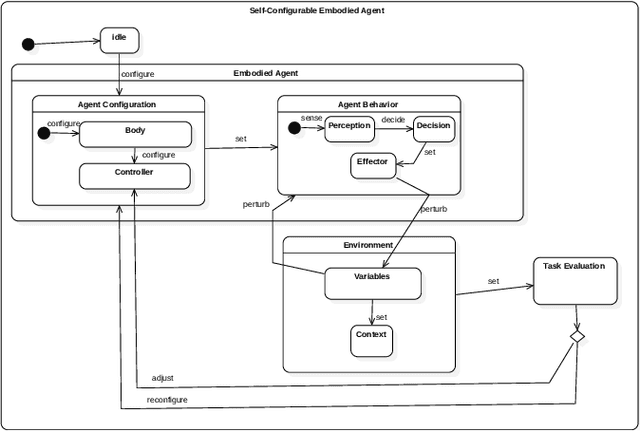
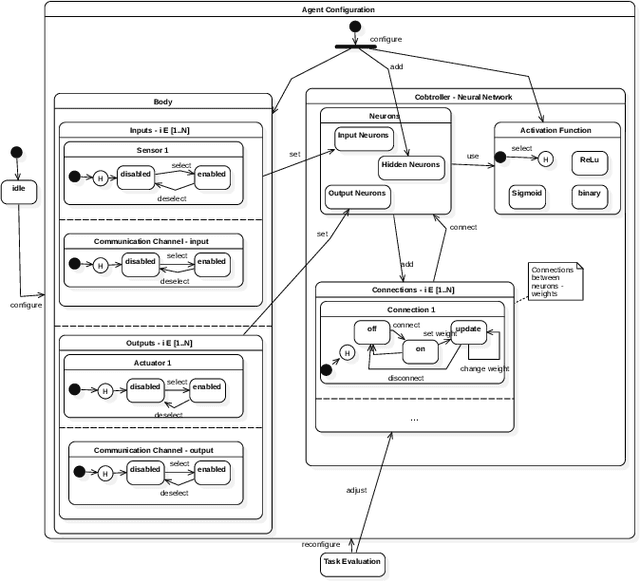
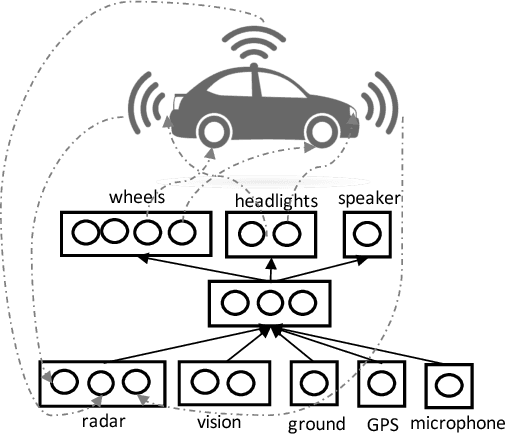
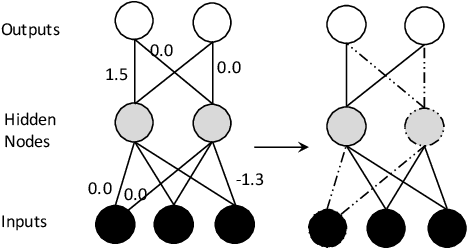
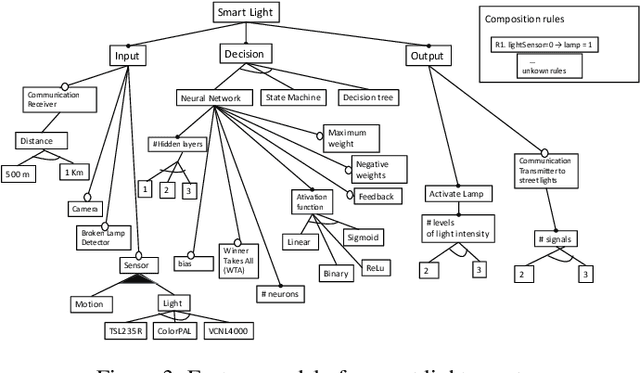
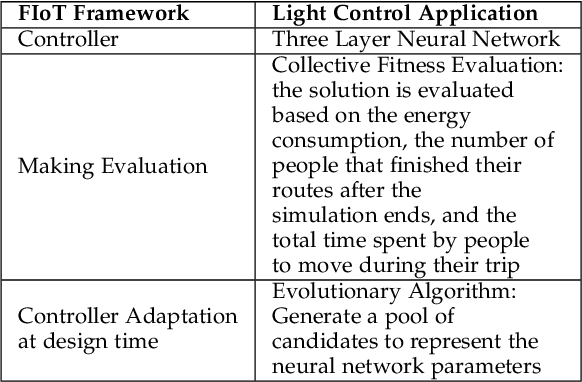
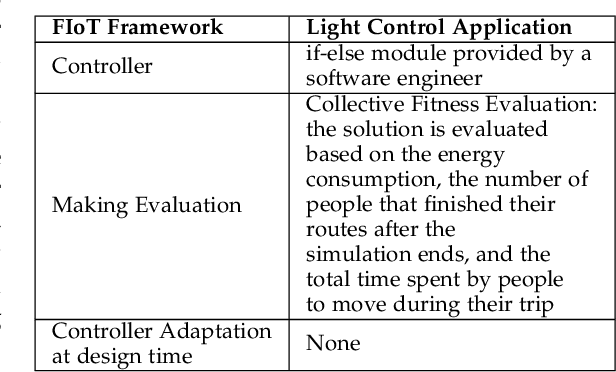
Embodied agents is a term used to denote intelligent agents, which are a component of devices belonging to the Internet of Things (IoT) domain. Each agent is provided with sensors and actuators to interact with the environment, and with a 'controller' that usually contains an artificial neural network (ANN). In previous publications, we introduced three software approaches to design, implement and test IoT embodied agents. In this paper, we propose a reference model based on statecharts that offers abstractions tailored to the development of IoT applications. The model represents embodied agents that are controlled by neural networks. Our model includes the ANN training process, represented as a reconfiguration step such as changing agent features or neural net connections. Our contributions include the identification of the main characteristics of IoT embodied agents, a reference model specification based on statecharts, and an illustrative application of the model to support autonomous street lights. The proposal aims to support the design and implementation of IoT applications by providing high-level design abstractions and models, thus enabling the designer to have a uniform approach to conceiving, designing and explaining such applications.
Testing Self-Organizing Multiagent Systems
Apr 03, 2019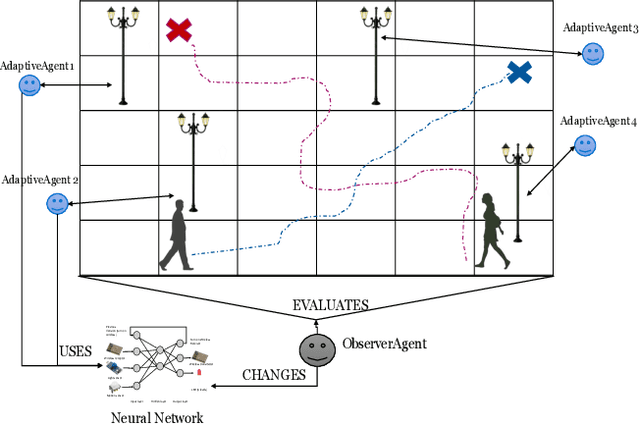
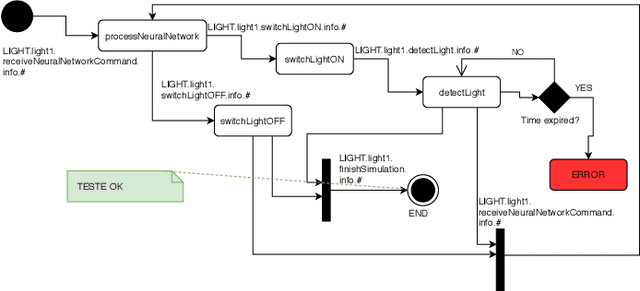
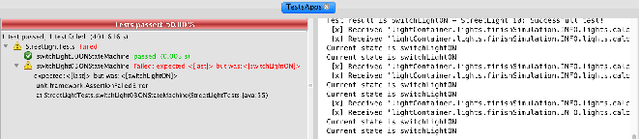

Multiagent Systems (MASs) involve different characteristics, such as autonomy, asynchronous and social features, which make these systems more difficult to understand. Thus, there is a lack of procedures guaranteeing that multiagent systems would behave as desired. Further complicating the situation is the fact that current agent-based approaches may also involve non-deterministic characteristics, such as learning, self-adaptation and self-organization (SASO). Nonetheless, there is a gap in the literature regarding the testing of systems with these features. This paper presents a publish-subscribe-based approach to develop test applications that facilitate the process of failure diagnosis in a self-organizing MAS. These tests are able to detect failures at the global behavior of the system or at the local properties of its parts. To illustrate the use of this approach, we developed a self-organizing MAS system based on the context of the Internet of Things (IoT), which simulates a set of smart street lights, and we performed functional ad-hoc tests. The street lights need to interact with each other in order to achieve the global goals of reducing the energy consumption and maintaining the maximum visual comfort in illuminated areas. To achieve these global behaviors, the street lights develop local behaviors automatically through a self-organizing process based on machine learning algorithms.
An IoT Analytics Embodied Agent Model based on Context-Aware Machine Learning
Dec 14, 2018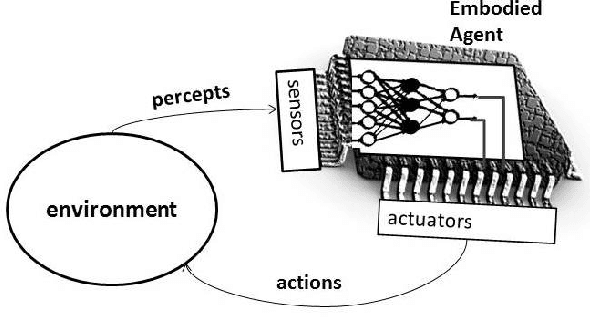
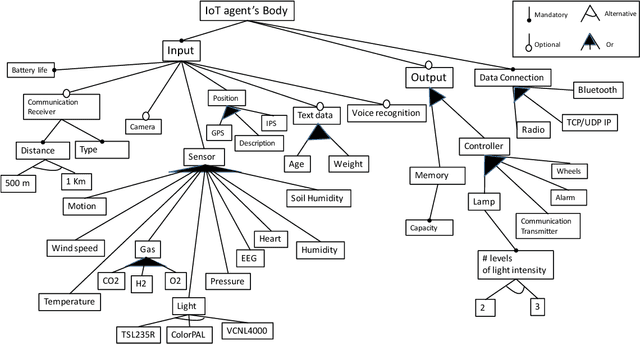
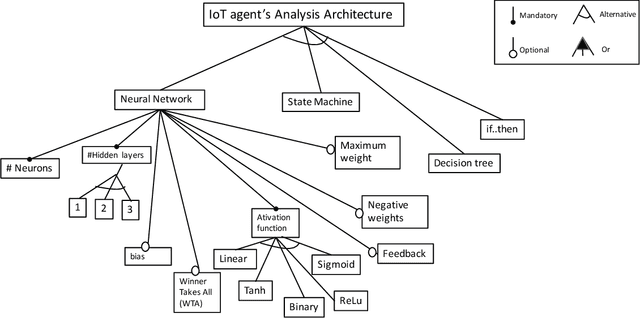
Agent-based Internet of Things (IoT) applications have recently emerged as applications that can involve sensors, wireless devices, machines and software that can exchange data and be accessed remotely. Such applications have been proposed in several domains including health care, smart cities and agriculture. However, despite their increased adoption, deploying these applications in specific settings has been very challenging because of the complex static and dynamic variability of the physical devices such as sensors and actuators, the software application behavior and the environment in which the application is embedded. In this paper, we propose a modeling approach for IoT analytics based on learning embodied agents (i.e. situated agents). The approach involves: (i) a variability model of IoT embodied agents; (ii) feedback evaluative machine learning; and (iii) reconfiguration of a group of agents in accordance with environmental context. The proposed approach advances the state of the art in that it facilitates the development of Agent-based IoT applications by explicitly capturing their complex and dynamic variabilities and supporting their self-configuration based on an context-aware and machine learning-based approach.
Machine Learning-based Variability Handling in IoT Agents
Feb 12, 2018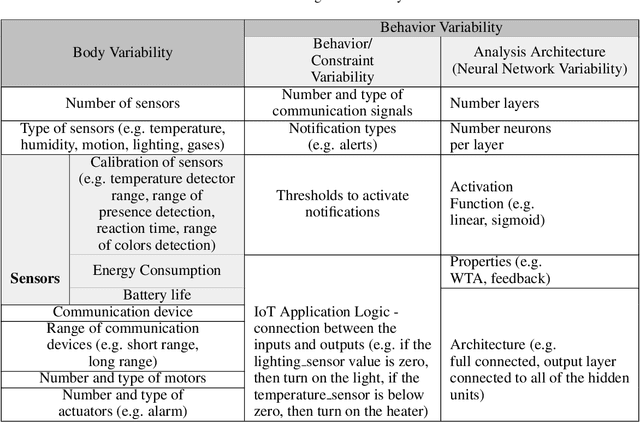
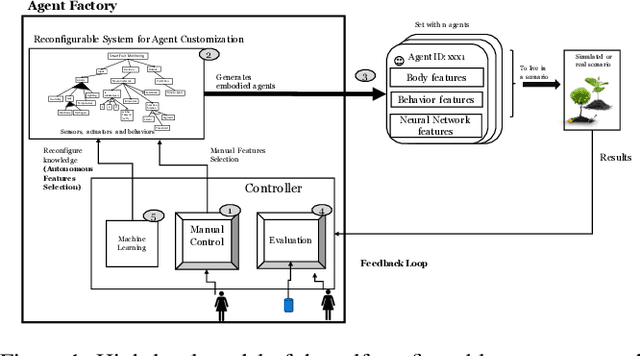
Agent-based IoT applications have recently been proposed in several domains, such as health care, smart cities and agriculture. Deploying these applications in specific settings has been very challenging for many reasons including the complex static and dynamic variability of the physical devices such as sensors and actuators, the software application behavior and the environment in which the application is embedded. In this paper, we propose a self-configurable IoT agent approach based on feedback-evaluative machine-learning. The approach involves: i) a variability model of IoT agents; ii) generation of sets of customized agents; iii) feedback evaluative machine learning; iv) modeling and composition of a group of IoT agents; and v) a feature-selection method based on manual and automatic feedback.
Software Engineers vs. Machine Learning Algorithms: An Empirical Study Assessing Performance and Reuse Tasks
Feb 07, 2018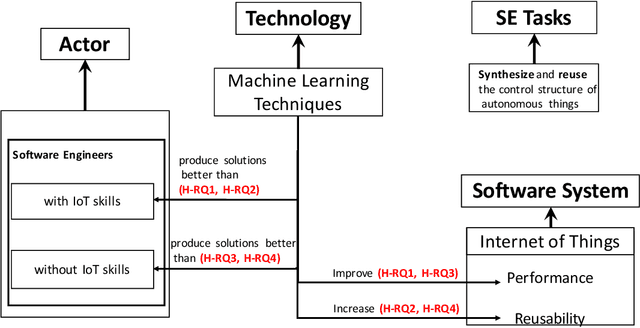
Several papers have recently contained reports on applying machine learning (ML) to the automation of software engineering (SE) tasks, such as project management, modeling and development. However, there appear to be no approaches comparing how software engineers fare against machine-learning algorithms as applied to specific software development tasks. Such a comparison is essential to gain insight into which tasks are better performed by humans and which by machine learning and how cooperative work or human-in-the-loop processes can be implemented more effectively. In this paper, we present an empirical study that compares how software engineers and machine-learning algorithms perform and reuse tasks. The empirical study involves the synthesis of the control structure of an autonomous streetlight application. Our approach consists of four steps. First, we solved the problem using machine learning to determine specific performance and reuse tasks. Second, we asked software engineers with different domain knowledge levels to provide a solution to the same tasks. Third, we compared how software engineers fare against machine-learning algorithms when accomplishing the performance and reuse tasks based on criteria such as energy consumption and safety. Finally, we analyzed the results to understand which tasks are better performed by either humans or algorithms so that they can work together more effectively. Such an understanding and the resulting human-in-the-loop approaches, which take into account the strengths and weaknesses of humans and machine-learning algorithms, are fundamental not only to provide a basis for cooperative work in support of software engineering, but also, in other areas.