 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUni-Mapper: Unified Mapping Framework for Multi-modal LiDARs in Complex and Dynamic Environments
Jul 28, 2025The unification of disparate maps is crucial for enabling scalable robot operation across multiple sessions and collaborative multi-robot scenarios. However, achieving a unified map robust to sensor modalities and dynamic environments remains a challenging problem. Variations in LiDAR types and dynamic elements lead to differences in point cloud distribution and scene consistency, hindering reliable descriptor generation and loop closure detection essential for accurate map alignment. To address these challenges, this paper presents Uni-Mapper, a dynamic-aware 3D point cloud map merging framework for multi-modal LiDAR systems. It comprises dynamic object removal, dynamic-aware loop closure, and multi-modal LiDAR map merging modules. A voxel-wise free space hash map is built in a coarse-to-fine manner to identify and reject dynamic objects via temporal occupancy inconsistencies. The removal module is integrated with a LiDAR global descriptor, which encodes preserved static local features to ensure robust place recognition in dynamic environments. In the final stage, multiple pose graph optimizations are conducted for both intra-session and inter-map loop closures. We adopt a centralized anchor-node strategy to mitigate intra-session drift errors during map merging. In the final stage, centralized anchor-node-based pose graph optimization is performed to address intra- and inter-map loop closures for globally consistent map merging. Our framework is evaluated on diverse real-world datasets with dynamic objects and heterogeneous LiDARs, showing superior performance in loop detection across sensor modalities, robust mapping in dynamic environments, and accurate multi-map alignment over existing methods. Project Page: https://sparolab.github.io/research/uni_mapper.
ReFeree: Radar-Based Lightweight and Robust Localization using Feature and Free space
Oct 02, 2024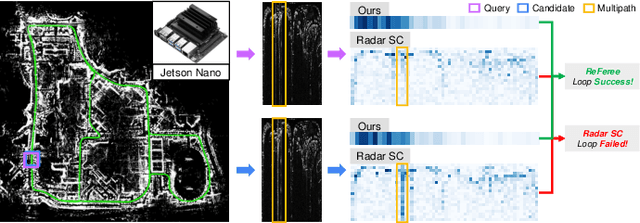
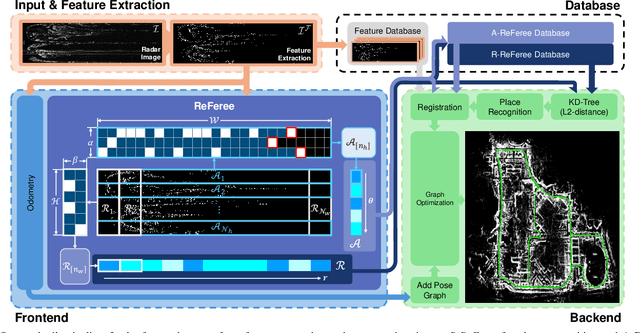
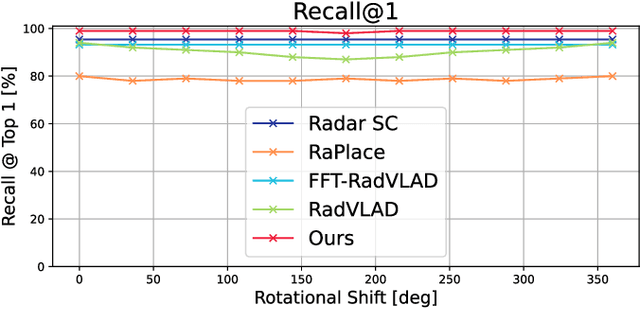
Place recognition plays an important role in achieving robust long-term autonomy. Real-world robots face a wide range of weather conditions (e.g. overcast, heavy rain, and snowing) and most sensors (i.e. camera, LiDAR) essentially functioning within or near-visible electromagnetic waves are sensitive to adverse weather conditions, making reliable localization difficult. In contrast, radar is gaining traction due to long electromagnetic waves, which are less affected by environmental changes and weather independence. In this work, we propose a radar-based lightweight and robust place recognition. We achieve rotational invariance and lightweight by selecting a one-dimensional ring-shaped description and robustness by mitigating the impact of false detection utilizing opposite noise characteristics between free space and feature. In addition, the initial heading can be estimated, which can assist in building a SLAM pipeline that combines odometry and registration, which takes into account onboard computing. The proposed method was tested for rigorous validation across various scenarios (i.e. single session, multi-session, and different weather conditions). In particular, we validate our descriptor achieving reliable place recognition performance through the results of extreme environments that lacked structural information such as an OORD dataset.
ReFeree: Radar-based efficient global descriptor using a Feature and Free space for Place Recognition
Mar 21, 2024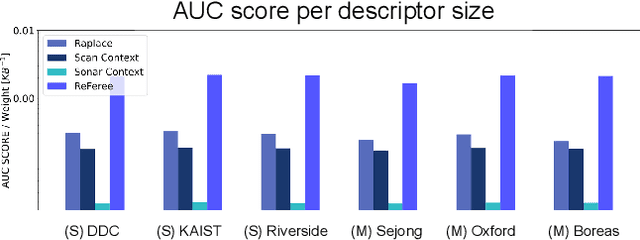
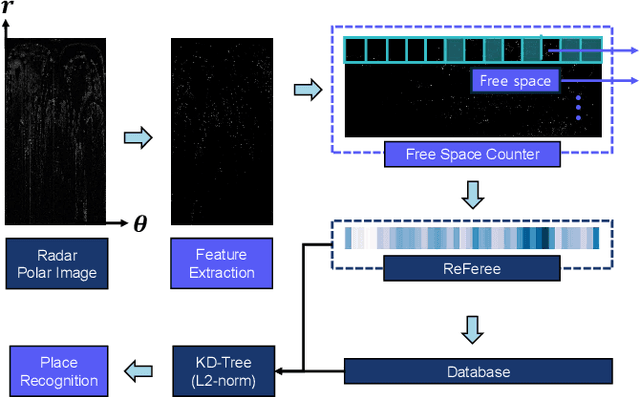
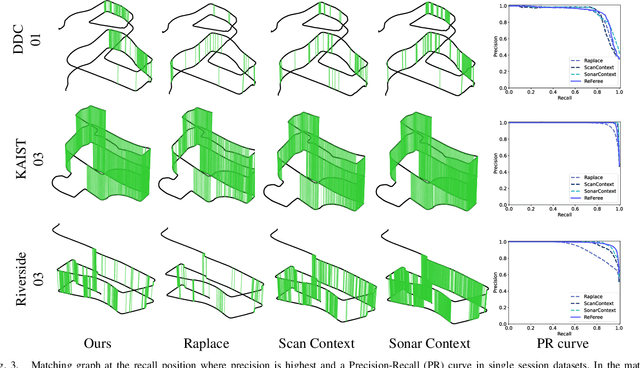
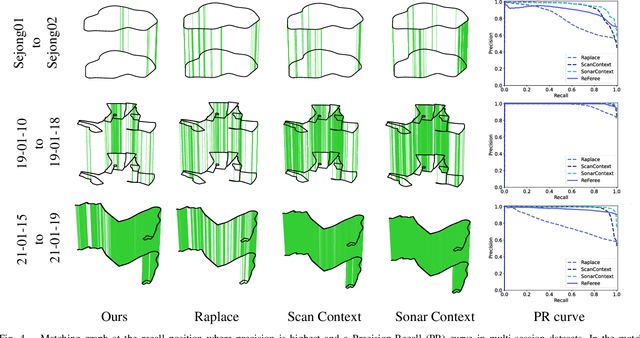
Radar is highlighted for robust sensing capabilities in adverse weather conditions (e.g. dense fog, heavy rain, or snowfall). In addition, Radar can cover wide areas and penetrate small particles. Despite these advantages, Radar-based place recognition remains in the early stages compared to other sensors due to its unique characteristics such as low resolution, and significant noise. In this paper, we propose a Radarbased place recognition utilizing a descriptor called ReFeree using a feature and free space. Unlike traditional methods, we overwhelmingly summarize the Radar image. Despite being lightweight, it contains semi-metric information and is also outstanding from the perspective of place recognition performance. For concrete validation, we test a single session from the MulRan dataset and a multi-session from the Oxford Radar RobotCar and the Boreas dataset.