 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReFeree: Radar-Based Lightweight and Robust Localization using Feature and Free space
Paper and Code
Oct 02, 2024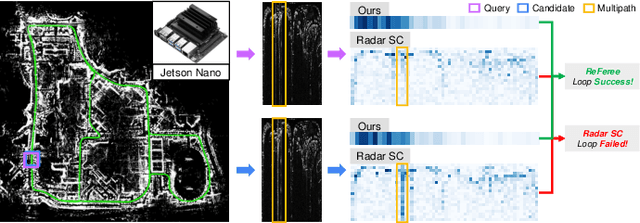
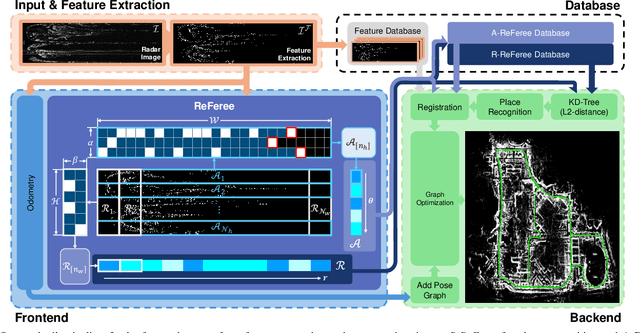
Place recognition plays an important role in achieving robust long-term autonomy. Real-world robots face a wide range of weather conditions (e.g. overcast, heavy rain, and snowing) and most sensors (i.e. camera, LiDAR) essentially functioning within or near-visible electromagnetic waves are sensitive to adverse weather conditions, making reliable localization difficult. In contrast, radar is gaining traction due to long electromagnetic waves, which are less affected by environmental changes and weather independence. In this work, we propose a radar-based lightweight and robust place recognition. We achieve rotational invariance and lightweight by selecting a one-dimensional ring-shaped description and robustness by mitigating the impact of false detection utilizing opposite noise characteristics between free space and feature. In addition, the initial heading can be estimated, which can assist in building a SLAM pipeline that combines odometry and registration, which takes into account onboard computing. The proposed method was tested for rigorous validation across various scenarios (i.e. single session, multi-session, and different weather conditions). In particular, we validate our descriptor achieving reliable place recognition performance through the results of extreme environments that lacked structural information such as an OORD dataset.