 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmart Automotive Technology Adherence to the Law: (De)Constructing Road Rules for Autonomous System Development, Verification and Safety
Sep 10, 2021
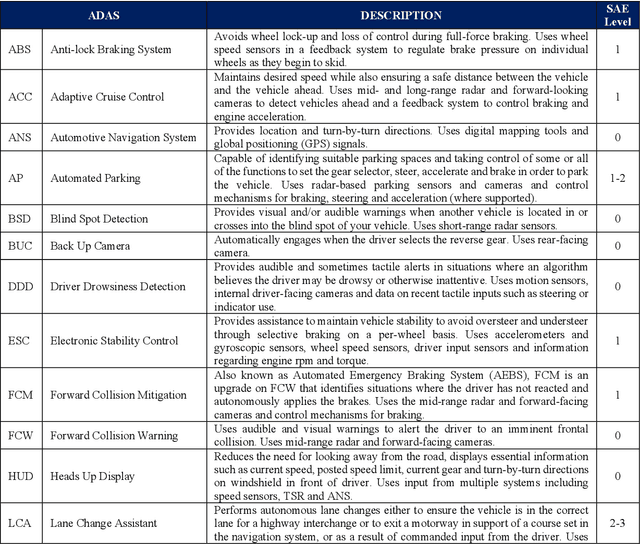

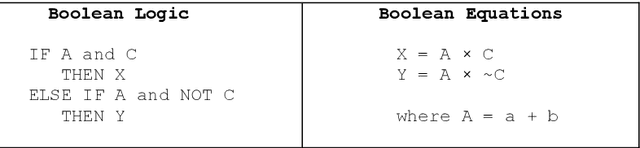
Driving is an intuitive task that requires skills, constant alertness and vigilance for unexpected events. The driving task also requires long concentration spans focusing on the entire task for prolonged periods, and sophisticated negotiation skills with other road users, including wild animals. These requirements are particularly important when approaching intersections, overtaking, giving way, merging, turning and while adhering to the vast body of road rules. Modern motor vehicles now include an array of smart assistive and autonomous driving systems capable of subsuming some, most, or in limited cases, all of the driving task. The UK Department of Transport's response to the Safe Use of Automated Lane Keeping System consultation proposes that these systems are tested for compliance with relevant traffic rules. Building these smart automotive systems requires software developers with highly technical software engineering skills, and now a lawyer's in-depth knowledge of traffic legislation as well. These skills are required to ensure the systems are able to safely perform their tasks while being observant of the law. This paper presents an approach for deconstructing the complicated legalese of traffic law and representing its requirements and flow. The approach (de)constructs road rules in legal terminology and specifies them in structured English logic that is expressed as Boolean logic for automation and Lawmaps for visualisation. We demonstrate an example using these tools leading to the construction and validation of a Bayesian Network model. We strongly believe these tools to be approachable by programmers and the general public, and capable of use in developing Artificial Intelligence to underpin motor vehicle smart systems, and in validation to ensure these systems are considerate of the law when making decisions.