 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge-Based Programs as Plans: Succinctness and the Complexity of Plan Existence
Oct 23, 2013Knowledge-based programs (KBPs) are high-level protocols describing the course of action an agent should perform as a function of its knowledge. The use of KBPs for expressing action policies in AI planning has been surprisingly overlooked. Given that to each KBP corresponds an equivalent plan and vice versa, KBPs are typically more succinct than standard plans, but imply more on-line computation time. Here we make this argument formal, and prove that there exists an exponential succinctness gap between knowledge-based programs and standard plans. Then we address the complexity of plan existence. Some results trivially follow from results already known from the literature on planning under incomplete knowledge, but many were unknown so far.
Probabilistic Conditional Preference Networks
Sep 26, 2013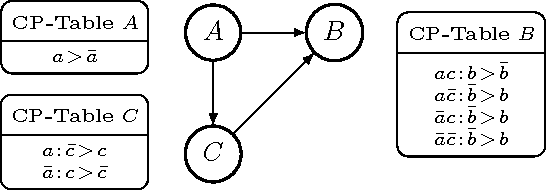
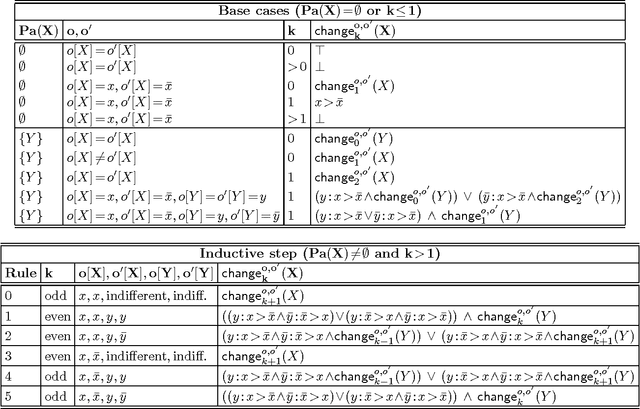
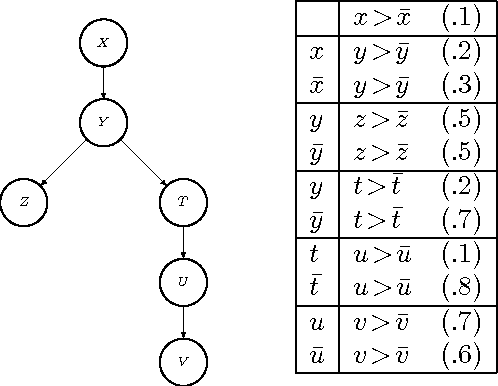
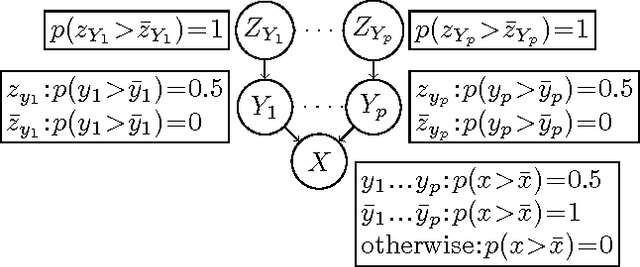
In order to represent the preferences of a group of individuals, we introduce Probabilistic CP-nets (PCP-nets). PCP-nets provide a compact language for representing probability distributions over preference orderings. We argue that they are useful for aggregating preferences or modelling noisy preferences. Then we give efficient algorithms for the main reasoning problems, namely for computing the probability that a given outcome is preferred to another one, and the probability that a given outcome is optimal. As a by-product, we obtain an unexpected linear-time algorithm for checking dominance in a standard, tree-structured CP-net.