 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncreased Mobility in Presence of Multiple Contacts - Identifying Contact Configurations that Enable Arbitrary Acceleration of CoM
Aug 09, 2016



Planning of any motion starts by planning the trajectory of the CoM. It is of the highest importance to ensure that the robot will be able to perform planned trajectory. With increasing capabilities of the humanoid robots, the case when contacts are spatially distributed should be considered. In this paper, it is shown that there are some contact configurations in which any acceleration of the center of mass (CoM) is feasible. The procedure for identifying such a configurations is presented, as well as its physical meaning. On the other hand, for the configurations in which the constraint on CoM movement exists, it will be shown how to find that linear constraint, which defines the space of feasible motion. The proposed algorithm has a low complexity and to speed up the procedure even further, it will be shown that the whole procedure needs to be run only once when contact configuration changes. As the CoM moves, the new constraints can be calculated from the initial one, thus yielding significant computation speedup. The methods are illustrated in two simulated scenarios.
How to achieve various gait patterns from single nominal
Dec 11, 2004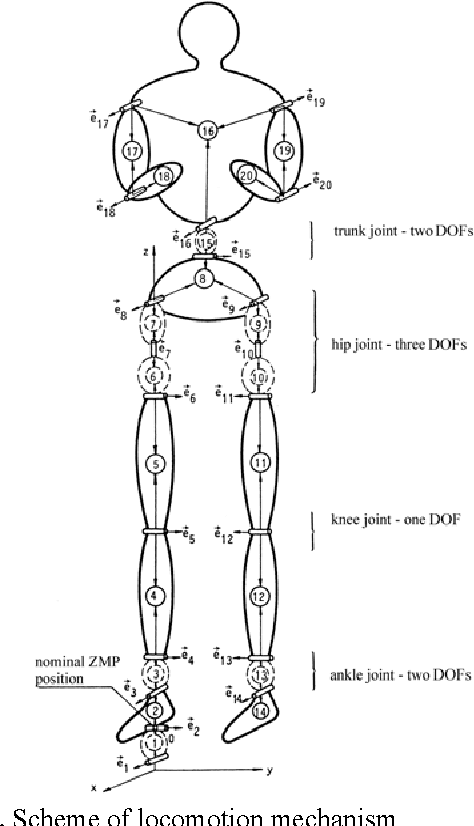
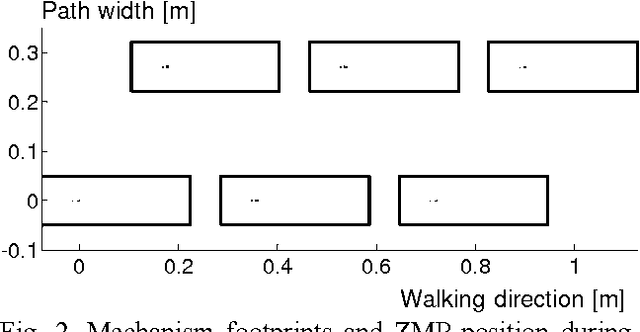


In this paper is presented an approach to achieving on-line modification of nominal biped gait without recomputing entire dynamics when steady motion is performed. Straight, dynamically balanced walk was used as a nominal gait, and applied modifications were speed-up and slow-down walk and turning left and right. It is shown that the disturbances caused by these modifications jeopardize dynamic stability, but they can be simply compensated to enable walk continuation.