Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to achieve various gait patterns from single nominal
Dec 11, 2004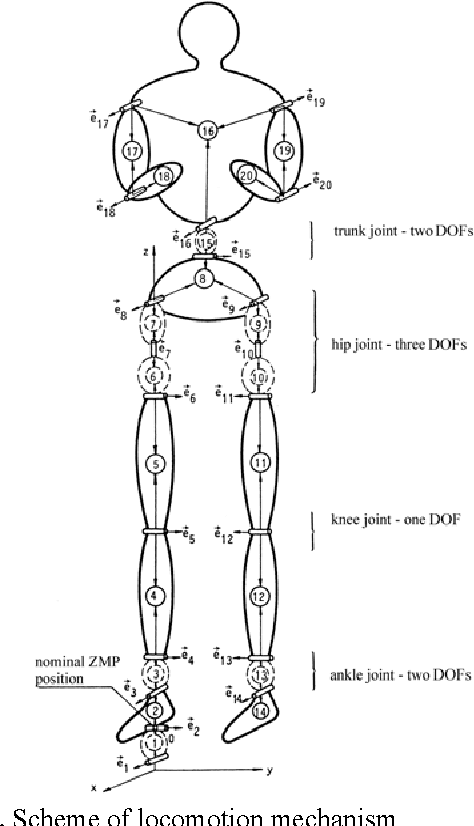
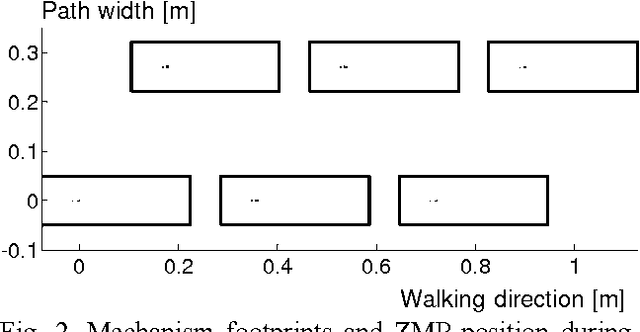


In this paper is presented an approach to achieving on-line modification of nominal biped gait without recomputing entire dynamics when steady motion is performed. Straight, dynamically balanced walk was used as a nominal gait, and applied modifications were speed-up and slow-down walk and turning left and right. It is shown that the disturbances caused by these modifications jeopardize dynamic stability, but they can be simply compensated to enable walk continuation.
* International Journal of Advanced Robotic Systems, Volume 1,
Number 2, June 2004, pp. 99-108
Via