 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMathematical Models of Human Drivers Using Artificial Risk Fields
May 24, 2022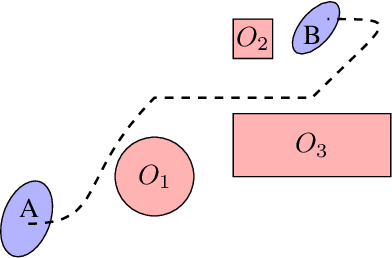
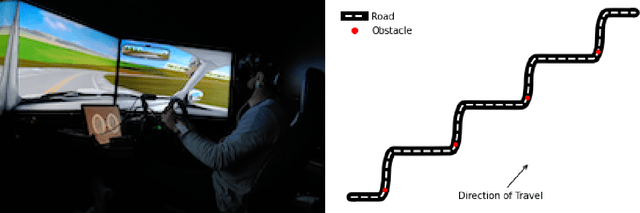
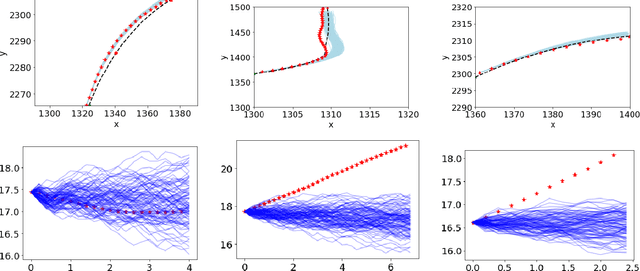
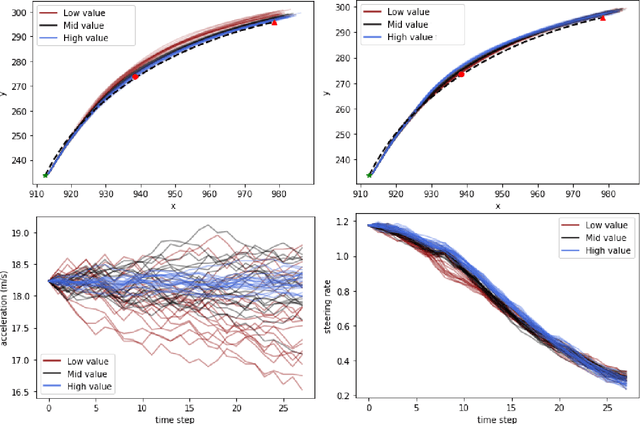
In this paper, we use the concept of artificial risk fields to predict how human operators control a vehicle in response to upcoming road situations. A risk field assigns a non-negative risk measure to the state of the system in order to model how close that state is to violating a safety property, such as hitting an obstacle or exiting the road. Using risk fields, we construct a stochastic model of the operator that maps from states to likely actions. We demonstrate our approach on a driving task wherein human subjects are asked to drive a car inside a realistic driving simulator while avoiding obstacles placed on the road. We show that the most likely risk field given the driving data is obtained by solving a convex optimization problem. Next, we apply the inferred risk fields to generate distinct driving behaviors while comparing predicted trajectories against ground truth measurements. We observe that the risk fields are excellent at predicting future trajectory distributions with high prediction accuracy for up to twenty seconds prediction horizons. At the same time, we observe some challenges such as the inability to account for how drivers choose to accelerate/decelerate based on the road conditions.