 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTexture Generation Using Graph Generative Adversarial Network And Differentiable Rendering
Jun 17, 2022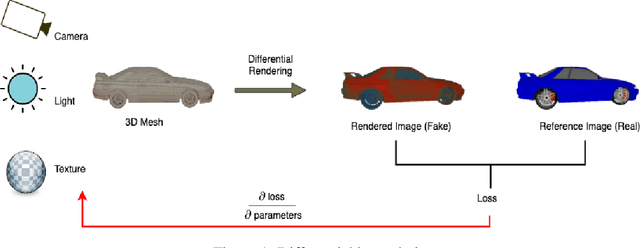
Novel texture synthesis for existing 3D mesh models is an important step towards photo realistic asset generation for existing simulators. But existing methods inherently work in the 2D image space which is the projection of the 3D space from a given camera perspective. These methods take camera angle, 3D model information, lighting information and generate photorealistic 2D image. To generate a photorealistic image from another perspective or lighting, we need to make a computationally expensive forward pass each time we change the parameters. Also, it is hard to generate such images for a simulator that can satisfy the temporal constraints the sequences of images should be similar but only need to change the viewpoint of lighting as desired. The solution can not be directly integrated with existing tools like Blender and Unreal Engine. Manual solution is expensive and time consuming. We thus present a new system called a graph generative adversarial network (GGAN) that can generate textures which can be directly integrated into a given 3D mesh models with tools like Blender and Unreal Engine and can be simulated from any perspective and lighting condition easily.
Federated Reconnaissance: Efficient, Distributed, Class-Incremental Learning
Sep 01, 2021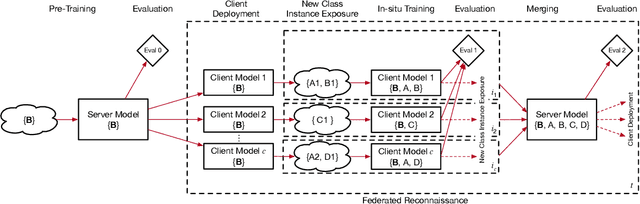
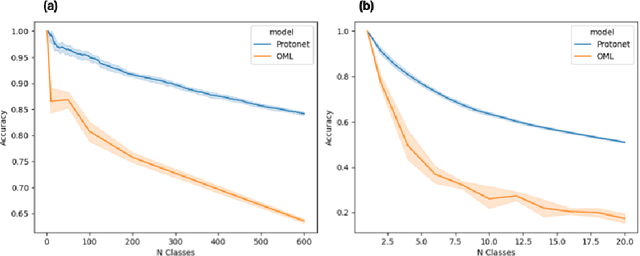
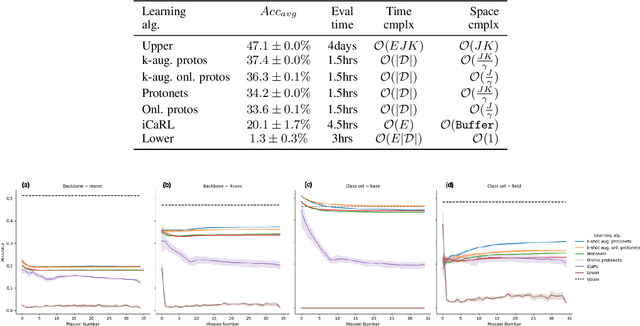
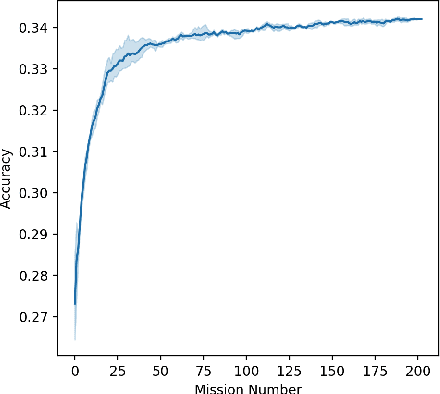
We describe federated reconnaissance, a class of learning problems in which distributed clients learn new concepts independently and communicate that knowledge efficiently. In particular, we propose an evaluation framework and methodological baseline for a system in which each client is expected to learn a growing set of classes and communicate knowledge of those classes efficiently with other clients, such that, after knowledge merging, the clients should be able to accurately discriminate between classes in the superset of classes observed by the set of clients. We compare a range of learning algorithms for this problem and find that prototypical networks are a strong approach in that they are robust to catastrophic forgetting while incorporating new information efficiently. Furthermore, we show that the online averaging of prototype vectors is effective for client model merging and requires only a small amount of communication overhead, memory, and update time per class with no gradient-based learning or hyperparameter tuning. Additionally, to put our results in context, we find that a simple, prototypical network with four convolutional layers significantly outperforms complex, state of the art continual learning algorithms, increasing the accuracy by over 22% after learning 600 Omniglot classes and over 33% after learning 20 mini-ImageNet classes incrementally. These results have important implications for federated reconnaissance and continual learning more generally by demonstrating that communicating feature vectors is an efficient, robust, and effective means for distributed, continual learning.