 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Optimal Control Formulation of Tool Affordance Applied to Impact Tasks
Feb 09, 2024Humans use tools to complete impact-aware tasks such as hammering a nail or playing tennis. The postures adopted to use these tools can significantly influence the performance of these tasks, where the force or velocity of the hand holding a tool plays a crucial role. The underlying motion planning challenge consists of grabbing the tool in preparation for the use of this tool with an optimal body posture. Directional manipulability describes the dexterity of force and velocity in a joint configuration along a specific direction. In order to take directional manipulability and tool affordances into account, we apply an optimal control method combining iterative linear quadratic regulator(iLQR) with the alternating direction method of multipliers(ADMM). Our approach considers the notion of tool affordances to solve motion planning problems, by introducing a cost based on directional velocity manipulability. The proposed approach is applied to impact tasks in simulation and on a real 7-axis robot, specifically in a nail-hammering task with the assistance of a pilot hole. Our comparison study demonstrates the importance of maximizing directional manipulability in impact-aware tasks.
Imitation of Manipulation Skills Using Multiple Geometries
Mar 02, 2022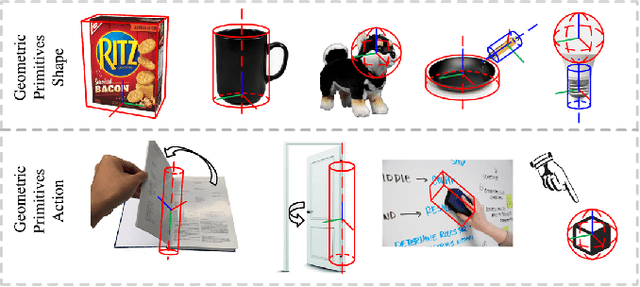
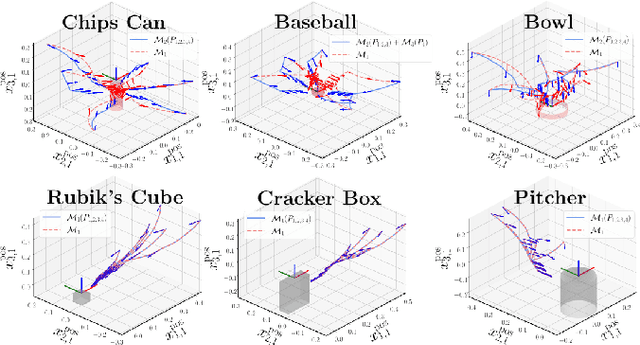
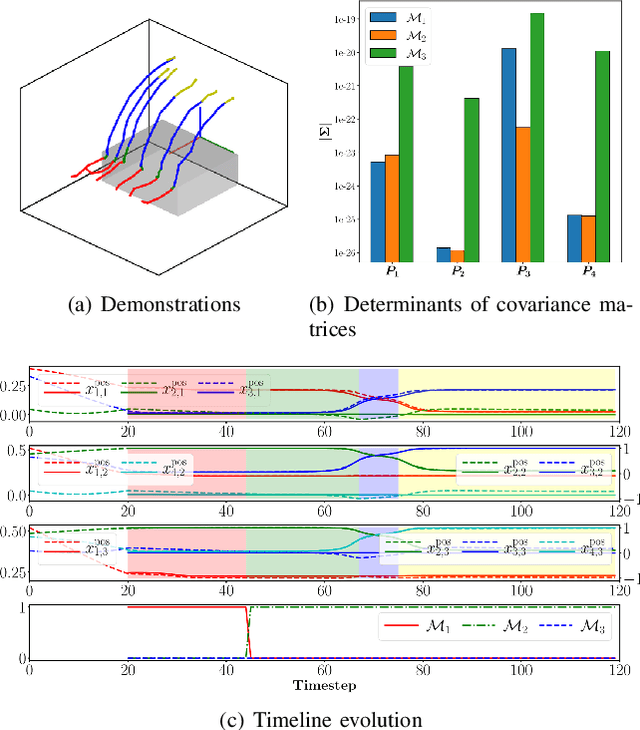
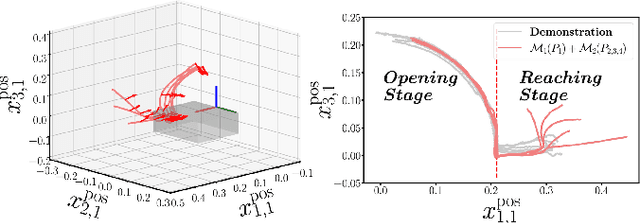
Daily manipulation tasks are characterized by regular characteristics associated with the task structure, which can be described by multiple geometric primitives related to actions and object shapes. Such geometric descriptors can not be expressed only in Cartesian coordinate systems. In this paper, we propose a learning approach to extract the optimal representation from a dictionary of coordinate systems to represent an observed movement. This is achieved by using an extension of Gaussian distributions on Riemannian manifolds, which is used to analyse a set of user demonstrations statistically, by considering multiple geometries as candidate representations of the task. We formulate the reproduction problem as a general optimal control problem based on an iterative linear quadratic regulator (iLQR), where the Gaussian distribution in the extracted coordinate systems are used to define the cost function. We apply our approach to grasping and box opening tasks in simulation and on a 7-axis Franka Emika robot. The results show that the robot can exploit several geometries to execute the manipulation task and generalize it to new situations, by maintaining the invariant features of the skill in the coordinate system(s) of interest.